Agencia Estatal Boletín Oficial del Estado






LA COMISIÓN EUROPEA,
Visto el Tratado de Funcionamiento de la Unión Europea,
Vista la Directiva 96/53/CE del Consejo, de 25 de julio de 1996 (1), y en particular su artículo 10 quinquies, apartado 5,
Considerando lo siguiente:
|
(1) |
Los equipos de pesaje a bordo son una opción que la Directiva 96/53/CE ofrece a los Estados miembros para controlar los vehículos o los conjuntos de vehículos que puedan ir sobrecargados. |
|
(2) |
De conformidad con el artículo 10 quinquies, apartado 5, párrafo segundo, de la Directiva 96/53/CE, para garantizar la interoperabilidad, los equipos de pesaje a bordo deben poder transmitir a las autoridades competentes y al conductor, en todo momento, datos sobre el peso desde un vehículo en movimiento, a través de una interfaz definida por normas CEN en el ámbito de las comunicaciones dedicadas de corto alcance (normas CEN DSRC). Por consiguiente, deben adoptarse especificaciones técnicas que adapten el contenido de las normas a las especificidades de la información que deben proporcionar los equipos de pesaje a bordo. |
|
(3) |
Los equipos de pesaje a bordo pueden instalarse en vehículos de motor, remolques y semirremolques. Es preciso garantizar la compatibilidad recíproca entre los equipos de pesaje a bordo instalados en vehículos diferentes que formen parte de un conjunto de vehículos. La compatibilidad debe garantizarse mediante la aplicación de las normas europeas sobre los sistemas de transporte inteligente cooperativos (STI-C) contempladas en el acto delegado por el que se complementa la Directiva 2010/40/UE del Parlamento Europeo y del Consejo (2) en lo referente a la implantación y al uso operativo de dichos sistemas de transporte. |
|
(4) |
Los Estados miembros que exijan la instalación de equipos de pesaje a bordo deben poder eximir de esta obligación a los vehículos o conjuntos de vehículos para los que sea imposible superar el peso máximo autorizado, como los remolques o semirremolques diseñados específicamente para el transporte de líquidos o de ganado. |
|
(5) |
La utilización de equipos de pesaje a bordo para vigilar el cumplimiento de la legislación puede ocasionar intentos de manipulación, como ocurre con otros sistemas de los vehículos, tales como los tacógrafos digitales o los sistemas de limitación de emisiones. A fin de mantener un nivel adecuado de seguridad contra las manipulaciones, la comunicación entre el vehículo de motor y el remolque o semirremolque debe estar protegida. Asimismo, los equipos de pesaje a bordo deben estar certificados con arreglo a criterios comunes por un organismo de certificación que haya sido reconocido por el Comité de Gestión en el marco del Acuerdo sobre el reconocimiento mutuo de certificados de evaluación de la seguridad de las tecnologías de la información del Grupo de Altos funcionarios sobre Seguridad de los Sistemas de Información (SOG-IS). |
|
(6) |
Los Estados miembros que opten por la instalación de equipos de pesaje a bordo de los vehículos deben velar por que dichos equipos sean inspeccionados por talleres de equipos OBW. Con el fin de garantizar la aplicación uniforme de las normas de interoperabilidad establecidas en el presente Reglamento, dichos talleres deben garantizar que los equipos a bordo funcionen con el nivel de exactitud adecuado. Estos talleres pueden ser, a reserva de los ajustes necesarios, los centros de inspección técnica contemplados en la Directiva 2014/45/UE del Parlamento Europeo y del Consejo (3), los talleres a los que se refiere el Reglamento (UE) n.o 165/2014 del Parlamento Europeo y del Consejo (4), o cualquier otro taller que cumpla los requisitos del presente Reglamento. Los Estados miembros que no opten por la introducción de equipos de pesaje a bordo conforme a lo dispuesto en el artículo 10 quinquies, apartado 1, de la Directiva 96/53/CE no deben tener que establecer tales talleres. |
|
(7) |
El estado actual de la tecnología no permite la implantación de las normas CEN DSRC ni de las STI-C en los equipos de pesaje a bordo de aquí al 27 de mayo de 2021. Por consiguiente, debe adoptarse un enfoque progresivo para la implantación de los equipos de pesaje a bordo, de manera que la industria pueda desarrollar productos que cumplan los requisitos del presente Reglamento y, en particular, los de su anexo II y algunos de su anexo III. Los Estados miembros que opten por instalar equipos de pesaje a bordo de los vehículos deben aplicar los requisitos relativos a la fase 1 que se establecen en los anexos I y III a más tardar el 27 de mayo de 2021. Es conveniente conceder un período adicional de tres años para la aplicación de los requisitos del anexo II y de los relativos a la fase 2 que se establecen en los anexos I y III. |
|
(8) |
Los Estados miembros pueden adoptar medidas específicas para exigir que vayan dotados con un equipo de pesaje a bordo los vehículos que deben ser inspeccionados por las autoridades competentes a fin de velar por el cumplimiento de la Directiva 96/53/CE y que hayan sido registrados y puestos en circulación en su territorio a partir del 27 de mayo de 2021. No es preciso reacondicionar los vehículos puestos en circulación y registrados antes de esa fecha con dicho equipo. |
|
(9) |
Las medidas previstas en el presente Reglamento se ajustan al dictamen del Comité del Transporte por Carretera al que hace referencia el artículo 10 decies de la Directiva 96/53/CE. |
HA ADOPTADO EL PRESENTE REGLAMENTO:
Ámbito de aplicación
1. El presente Reglamento establece condiciones uniformes para la interoperabilidad y la compatibilidad de los equipos de pesaje instalados a bordo de vehículos o conjuntos de vehículos a fin de velar por el cumplimiento del artículo 10 quinquies, apartados 4 y 5, de la Directiva 96/53/CE del Consejo o de los requisitos sobre peso máximo para el tráfico nacional del Estado miembro en el que el vehículo esté en uso.
2. El presente Reglamento no se aplicará a los Estados miembros que no hayan optado por la introducción de equipos de pesaje a bordo de conformidad con lo dispuesto en el artículo 10 quinquies, apartado 1, de la Directiva 96/53/CE.
3. Los Estados miembros podrán eximir de la obligación de instalar equipos de pesaje a bordo a los vehículos o conjuntos de vehículos cuyo diseño o tipo de carga impida superar el peso máximo autorizado. Dichas exenciones no se basarán en la masa máxima en carga técnicamente admisible de un vehículo que haya indicado el fabricante. Los vehículos o conjuntos de vehículos que se beneficien de una exención podrán seguir estando sujetos a los controles del peso máximo autorizado que realicen las autoridades competentes.
Definiciones
Se entenderá por:
a) «equipo de pesaje a bordo» («equipo de pesaje» u «OBW»), el dispositivo instalado en un vehículo capaz de determinar el peso total o el peso por eje;
b) «peso total», el peso total en kilogramos de un vehículo de motor y, en el caso de un conjunto de vehículos, el peso total del conjunto de vehículos que haya determinado un equipo de pesaje;
c) «peso por eje» o «carga por eje», el peso en kilogramos de un eje o grupo de ejes con carga que haya determinado un equipo de pesaje;
d) «peso calculado» o «valor del peso», el peso total o el peso por eje, en kilogramos;
e) «unidad del vehículo de motor» («unidad de cabina» o «MVU»), la parte de un equipo de pesaje instalada en el vehículo de motor, a excepción de los sensores, capaz de recoger, almacenar y tratar datos, así como de calcular los valores de peso resultantes de dichos datos;
f) «unidad de remolque» («TU»), la parte de un equipo de pesaje instalada en un remolque o semirremolque, a excepción de los sensores, capaz de recoger, almacenar y tratar los datos del equipo instalado en el remolque o semirremolque, así como de calcular los valores del peso por eje resultantes de dichos datos;
g) «unidad vehicular de comunicaciones dedicadas de corto alcance» («unidad vehicular DSRC»), el «dispositivo de teledetección temprana» a que se hace referencia en el apéndice 14 del anexo IC del Reglamento de Ejecución (UE) 2016/799 de la Comisión (5), que es capaz de recibir los datos de sistemas de pesaje a bordo (datos OWS) procedentes de una unidad de cabina (MVU) o de una estación STI-C, y de enviarlos a un lector de comunicación (REDCR);
h) «lector de comunicación de teledetección temprana» («lector de comunicación» o «REDCR»), el lector que obra en poder de las autoridades de control, capaz de leer los datos de sistemas de pesaje a bordo transmitidos por unidades vehiculares DSRC; este lector puede ser el mismo dispositivo utilizado para la lectura de los datos de monitorización remota (datos RTM) con arreglo al Reglamento (UE) 2016/799, si bien el REDCR deberá pedir por separado la transmisión de los datos RTM y la de los datos OWS;
i) «datos de peso», los datos en bruto transmitidos entre los elementos de los sistemas de pesaje a bordo que deben tratarse para obtener el cálculo del peso;
j) «datos del sistema de pesaje a bordo» («datos OWS»), los datos protegidos de formato definido que solicita el REDCR a la unidad vehicular DSRC;
k) «sensor», el elemento del equipo de pesaje que es capaz de generar datos de peso midiendo parámetros físicos específicos, datos que tratan posteriormente la unidad de cabina o la unidad de remolque;
l) «estación de sistemas de transporte inteligentes cooperativos» («estación STI-C»), estación STI-C a tenor del acto delegado por el que se complementa la Directiva 2010/40/UE del Parlamento Europeo y del Consejo en lo que respecta a la implantación y al uso operativo de los sistemas de transporte inteligentes cooperativos, adoptado sobre la base del artículo 6, apartado 1, de dicha Directiva;
m) «fase de asignación de direcciones», la fase preliminar de la comunicación electrónica entre vehículos de un conjunto de vehículos en la que se asigna una posición a cada vehículo;
n) «taller de equipos de pesaje a bordo» («taller de equipos OBW»), taller autorizado por un Estado miembro para inspeccionar los equipos de pesaje a bordo.
Política de certificados
Los Estados miembros velarán por que haya al menos una autoridad de certificación raíz, una autoridad de inscripción y una autoridad de autorización habilitadas para asumir, a efectos de los equipos de pesaje a bordo, las funciones establecidas en la Política de certificación para la implantación y el funcionamiento de los sistemas de transporte inteligentes cooperativos (STI-C) contemplada en el acto delegado por el que se complementa la Directiva 2010/40/UE del Parlamento Europeo y del Consejo en lo que respecta a la implantación y el funcionamiento de los STI-C, adoptado en virtud del artículo 6, apartado 1, de dicha Directiva.
Inspecciones periódicas
1. Los equipos de pesaje a bordo deberán ser sometidos cada dos años a una inspección periódica a cargo de talleres de equipos OBW después de su instalación en el vehículo o el conjunto de vehículos.
2. Las inspecciones periódicas se efectuarán de conformidad con el anexo IV.
3. Las inspecciones garantizarán el cumplimiento de los requisitos siguientes:
a) el equipo de pesaje a bordo se ha montado con arreglo a la documentación facilitada por el fabricante y es apto para el vehículo;
b) el equipo de pesaje a bordo funciona correctamente y proporciona valores de peso exactos;
c) el equipo de pesaje a bordo no lleva dispositivos de manipulación incorporados ni hay indicios de que se hayan utilizado tales dispositivos.
4. Al final de la inspección, el taller de equipos OBW emitirá un informe de inspección sobre el equipo de pesaje a bordo. Deberá conservarse en el vehículo una copia de dicho informe.
5. En el informe de inspección se recogerá, como mínimo, la información siguiente:
a) el número de identificación del vehículo (NIV o número de bastidor);
b) el lugar y la fecha de los ensayos;
c) si el vehículo ha superado los ensayos (sí/no);
d) las deficiencias que se hayan detectado, especialmente las manipulaciones, así como las medidas correctivas adoptadas;
e) la fecha de la siguiente inspección periódica o la fecha de caducidad del certificado vigente, si no se ofrece esta información por otros medios;
f) el nombre, la dirección y el número de identificación del taller de equipos OBW, así como la firma o la identificación del inspector responsable;
g) la marca, el tipo, el número de identificación, el número del certificado de examen de tipo y la fecha de la última verificación del dispositivo de pesaje certificado que se haya utilizado para el control periódico.
6. Los informes de inspección se conservarán durante un período mínimo de dos años a partir del momento de su elaboración, si bien los Estados miembros podrán decidir que se envíen a la autoridad competente durante ese período. En caso de que los talleres de equipos OBW deban guardar los informes sobre las inspecciones y calibraciones que hayan efectuado durante dicho período, los pondrán a disposición de la autoridad competente a petición de esta.
Talleres de equipos de pesaje a bordo
1. Los Estados miembros aprobarán, auditarán periódicamente y certificarán los talleres de equipos OBW que estén autorizados para realizar inspecciones de dichos equipos.
2. Los Estados miembros velarán por que los talleres de equipos OBW ubicados en sus territorios lleven a cabo inspecciones de dichos equipos de manera fiable. A tal efecto, establecerán y publicarán un conjunto de procedimientos que garanticen el cumplimiento de los criterios mínimos siguientes:
a) el personal del taller cuenta con la formación adecuada;
b) el taller cuenta con el equipo necesario para llevar a cabo los ensayos y las tareas pertinentes y este equipo ha sido certificado con arreglo a la Directiva 2014/31/UE del Parlamento Europeo y del Consejo (6) o la Directiva 2014/32/UE del Parlamento Europeo y del Consejo (7);
c) el taller goza de buena reputación.
3. Los talleres de equipos OBW estarán sujetos a las auditorías siguientes:
a) Al menos cada cinco años, a una auditoría realizada por un órgano de supervisión sobre los procedimientos aplicados al manipular los equipos de pesaje a bordo. La auditoría se centrará en las tareas y actividades establecidas en el punto 1 del anexo V de la Directiva 2014/45/UE. El órgano de supervisión deberá cumplir los requisitos establecidos en el punto 2 de dicho anexo.
b) También podrán realizarse auditorías técnicas sin previo aviso para comprobar las instalaciones de los equipos en los vehículos, las inspecciones y, en su caso, las calibraciones realizadas.
4. Los Estados miembros adoptarán las medidas adecuadas para prevenir los conflictos de intereses entre los talleres de equipos OBW y las empresas de transporte. En particular, cuando exista un riesgo grave de conflicto de intereses, especialmente en caso de talleres de equipos OBW que pertenezcan a empresas de transportes, se adoptarán medidas específicas adicionales para garantizar que dichos talleres cumplen lo dispuesto en el presente artículo.
5. Las autoridades competentes de los Estados miembros publicarán en sus sitios web una lista actualizada de talleres de equipos OBW en la que figuren al menos los datos siguientes:
a) número de identificación del taller y nombre de [la entidad o las entidades constitutivas] del taller;
b) dirección de correo postal;
c) dirección de correo electrónico;
d) número de teléfono.
6. Las autoridades competentes de los Estados miembros retirarán las autorizaciones que hayan concedido a talleres de equipos OBW, ya sea de forma temporal o permanente, que no cumplan las obligaciones que les impone el presente Reglamento.
Entrada en vigor y aplicación
El presente Reglamento entrará en vigor a los veinte días de su publicación en el Diario Oficial de la Unión Europea.
Será aplicable a partir del 27 de mayo de 2021.
No obstante, los puntos 1.4, letra d), 5.3 y 8.1 del anexo I, el anexo II y los puntos 3, 8.2 y 10 del anexo III se aplicarán a partir del 27 de mayo de 2024.
El presente Reglamento será obligatorio en todos sus elementos y directamente aplicable en cada Estado miembro.
Hecho en Bruselas, el 12 de julio de 2019.
Por la Comisión
El Presidente
Jean-Claude JUNCKER
(1) Directiva 96/53/CE del Consejo, de 25 de julio de 1996, por la que se establecen, para determinados vehículos de carretera que circulan en la Comunidad, las dimensiones máximas autorizadas en el tráfico nacional e internacional y los pesos máximos autorizados en el tráfico internacional (DO L 235 de 17.9.1996, p. 59).
(2) Directiva 2010/40/UE del Parlamento Europeo y del Consejo, de 7 de julio de 2010, por la que se establece el marco para la implantación de los sistemas de transporte inteligentes en el sector del transporte por carretera y para las interfaces con otros modos de transporte (DO L 207 de 6.8.2010, p. 1).
(3) Directiva 2014/45/UE del Parlamento Europeo y del Consejo, de 3 de abril de 2014, relativa a las inspecciones técnicas periódicas de los vehículos de motor y de sus remolques, y por la que se deroga la Directiva 2009/40/CE (DO L 127 de 29.4.2014, p. 51).
(4) Reglamento (UE) n.o 165/2014 del Parlamento Europeo y del Consejo, de 4 de febrero de 2014, relativo a los tacógrafos en el transporte por carretera, por el que se deroga el Reglamento (CEE) n.o 3821/85 del Consejo relativo al aparato de control en el sector de los transportes por carretera y se modifica el Reglamento (CE) n.o 561/2006 del Parlamento Europeo y del Consejo relativo a la armonización de determinadas disposiciones en materia social en el sector de los transportes por carretera (DO L 60 de 28.2.2014, p. 1).
(5) Reglamento de Ejecución (UE) 2016/799 de la Comisión, de 18 de marzo de 2016, por el que se ejecuta el Reglamento (UE) n.o 165/2014 del Parlamento Europeo y del Consejo, que establece los requisitos para la construcción, ensayo, instalación, funcionamiento y reparación de los tacógrafos y de sus componentes (DO L 139 de 26.5.2016, p. 1).
(6) Directiva 2014/31/UE del Parlamento Europeo y del Consejo, de 26 de febrero de 2014, sobre la armonización de las legislaciones de los Estados miembros en materia de comercialización de instrumentos de pesaje de funcionamiento no automático (DO L 96 de 29.3.2014, p. 107).
(7) Directiva 2014/32/UE del Parlamento Europeo y del Consejo, de 26 de febrero de 2014, sobre la armonización de las legislaciones de los Estados miembros en materia de comercialización de instrumentos de medida (DO L 96 de 29.3.2014, p. 149).
1. Disposiciones generales
1.1. El ámbito de aplicación del presente Reglamento incluye los tipos de sistemas de equipos de pesaje siguientes:
a) sistemas dinámicos: sistemas de equipos de pesaje que determinan el peso mediante la recogida y el tratamiento de la información de parámetros que se captan mientras el vehículo está en movimiento, como las aceleraciones, la tracción o las fuerzas de frenado, y que no tienen lugar cuando el vehículo está parado;
b) sistemas estáticos: sistemas de equipos de pesaje que determinan el peso con la información obtenida de parámetros que se captan mientras el vehículo está parado, como la presión en una cámara de neumático.
1.2. El presente Reglamento se aplicará en dos fases:
a) la fase 1 de los equipos de pesaje contemplada en el punto 5.2;
b) la fase 2 de los equipos de pesaje contemplada en el punto 5.3.
1.3. Los equipos de pesaje calcularán el peso total y, de manera optativa, el peso por eje.
1.4. Los equipos de pesaje comprenderán los elementos siguientes:
a) una unidad instalada en el vehículo de motor;
b) de forma opcional, una unidad de remolque instalada en el remolque o el semirremolque;
c) sensores;
d) para la fase 2, una estación STI-C en cada uno de los vehículos que constituyan una unidad de cabina o una unidad de remolque.
1.5. cada unidad de cabina o de remolque puede consistir en una sola unidad de tratamiento de datos o dividirse en unidades diferentes.
2. Unidad de vehículo de motor («unidad de cabina» o «MVU»)
La unidad de cabina deberá:
a) recibir la carga por eje de las unidades de remolque, en caso de haberlas;
b) recoger datos de peso procedentes de los sensores del vehículo de motor;
c) tratar la información disponible y calcular los valores de peso correspondientes.
3. Unidad de remolque («TU»)
En su caso, la unidad de remolque deberá:
a) recoger los datos de peso de los sensores del remolque o el semirremolque, tratar la información disponible y calcular las ponderaciones por eje resultantes de esos datos;
b) transferir los valores de peso del eje al vehículo de motor.
4. Cálculo del peso
4.1. En el caso de los sistemas dinámicos, se calculará un primer valor del peso a más tardar 15 minutos después de que el vehículo empiece a moverse hacia adelante y volverá a calcularse en lo sucesivo cada 10 minutos o en intervalos menores.
4.2. En el caso de los sistemas estáticos, los valores de peso se calcularán cada minuto cuando se haya arrancado el vehículo, pero permanezca parado.
4.3. La resolución del peso calculado será de 100 kg o mayor.
5. Intercambio de información entre el vehículo de motor y los remolques o semirremolques de un conjunto de vehículos
5.1. Cada remolque o semirremolque pondrá a disposición del vehículo de motor los valores de peso que haya calculado su equipo de conformidad con los puntos 5.2 o 5.3, según proceda.
5.2. Fase 1 de los equipos de pesaje
5.2.1. Todo remolque o semirremolque deberá tener asignada una posición dentro del conjunto de vehículos en el marco de una asignación dinámica de direcciones, tal como se establece en la norma ISO 11992-2:2014.
5.2.2. Una vez que haya tenido lugar la fase de asignación de direcciones, la unidad de remolque de cada remolque o semirremolque transferirá a la unidad de cabina la suma de las cargas por eje o la carga por eje conforme a la descripción que figura en los puntos 6.5.4.7 y 6.5.5.42 de la norma ISO 11992-2:2014.
5.2.3. Los mensajes sobre la suma de las cargas por eje o la carga por eje seguirán las especificaciones establecidas en la norma ISO 11992-2:2014 para los tipos de mensajes EBS22 y RGE22.
5.2.4. El formato, el encaminamiento y los intervalos generales de los parámetros de los mensajes deberán ajustarse a lo dispuesto en los puntos 6.1, 6.3 y 6.4 de la norma ISO 11992-2:2014.
5.3. Fase 2 de los equipos de pesaje
La información entre el vehículo de motor y los remolques o semirremolques remolcados se intercambiará mediante las estaciones STI-C establecidas en el anexo II.
5.4. En ambas fases de los equipos de pesaje pueden utilizarse especificaciones diferentes, siempre que el equipo de pesaje del vehículo de motor y de los remolques o semirremolques sea compatible con ellas.
6. Preparación de datos y transferencia de información a la unidad vehicular DSRC
La unidad de cabina (en la fase 1) o la estación STI-C de la cabina (en la fase 2) transmitirá al módulo de la unidad vehicular DSRC los datos del sistema de pesaje a bordo («datos OWS») de conformidad con el anexo III.
Figura 1
IMAGEN OMITIDA
Ejemplo de disposición de un equipo de pesaje en la fase 1 en un conjunto de vehículos compuesto por la cabina de un camión y un semirremolque

Sensores del vehículo de motor
Intercambio de información entre la unidad de cabina y la unidad de remolque según lo dispuesto en la norma ISO 11992-2:2014
unidad vehicular DSRC
Vehículo de motor (cabina)
Sensores del semirremolque
TU
unidad de cabina
Semirremolque
Figura 2
IMAGEN OMITIDA
Ejemplo de disposición de un equipo de pesaje en la fase 2 en un conjunto de vehículos compuesto por la cabina de un camión y un semirremolque

unidad vehicular DSRC
Unidad de cabina
TU
STI-C
STI-C
7. Información del peso dirigida al conductor
Se informará al conductor, como mínimo, del peso total, mediante una pantalla.
8. Exactitud
8.1. La exactitud del peso calculado será ± 5 % o mayor cuando el vehículo esté cargado más de 90 % de su peso máximo autorizado.
8.2. Sin perjuicio de lo dispuesto en el punto 8.1, en los equipos de pesaje en la fase 1 podrán tener una exactitud de ± 10 % o mayor.
1. El presente anexo se aplica exclusivamente a la fase 2 de los equipos de pesaje.
2. El vehículo de motor y los remolques o semirremolques del conjunto de vehículos que constituyan una unidad de remolque (TU) estarán equipados con una estación STI-C conectada a la unidad de cabina (MVU) o a la unidad de remolque (TU) del vehículo correspondiente. Las unidades de cabina y de remolque podrán integrarse en sus estaciones STI-C respectivas.
3. Las unidades de cabina y de remolque transmitirán a las estaciones STI-C a las que estén conectadas la información necesaria para la transmisión de los mensajes, de conformidad con el punto 4.3 del presente anexo.
Figura 3
IMAGEN OMITIDA
Ejemplo de flujo de mensajes en la fase 2 de los equipos de pesaje

Sensor
Sensor
Peso del eje de los remolques o semirremolques, violación de la seguridad...
Datos del sensor para el cálculo del peso
Peso por eje de los remolques o semirremolques, violación de la seguridad, error de comunicación
Estación STI-C
Estación STI-C
Equipo de pesaje de un remolque
Equipo de pesaje de un vehículo de motor
Datos del sensor para el cálculo del peso
Peso por eje del vehículo de motor, peso total, violación de la seguridad...
TU
MVU
4. Intercambio de información entre el vehículo de motor y los remolques o semirremolques
4.1. La información sobre el peso entre el vehículo de motor y los remolques o semirremolques remolcados se intercambiará a través de un enlace inalámbrico establecido entre las estaciones STI-C del vehículo de motor y de los remolques o semirremolques, de conformidad con las normas EN 302 663-V1.1.1 (a excepción de lo dispuesto en el punto 4.2.1), EN 302 636-4-1-V1.3.1, EN 302 636-5.1-V2.1.1 y con la norma europea sobre la aplicación de los equipos de pesaje a los STI-C que tiene previsto desarrollar el ETSI.
4.2. Los mensajes intercambiados por las estaciones STI-C se protegerán con arreglo a lo establecido en el punto 5.1.
4.3. Se transmitirá la información siguiente entre las estaciones STI-C:
a) el peso por eje de los remolques o semirremolques que sean remolcados;
b) los mensajes que recojan incidentes del tipo «error de comunicación de un equipo de pesaje»: se registrará un incidente de error de comunicación procedente de un equipo de pesaje cuando las estaciones STI-C no logren establecer una comunicación protegida entre ellas conforme a lo dispuesto en el punto 5.1 una vez realizados un mínimo de tres intentos;
c) los mensajes que recojan incidentes del tipo «intento de violación de la seguridad»: se registrará un incidente de intento de violación de la seguridad cuando el equipo de pesaje detecte un intento de manipulación, según lo establecido en el punto 5.2 y en el apéndice.
4.4. El formato de los mensajes que se requieren para la fase de asignación de direcciones y para la transmisión de la información contemplada en el punto 4.3 se establecerá en la norma sobre la aplicación de los equipos de pesaje a la que se hacer referencia en el punto 4.1.
5. Disposiciones de seguridad
5.1. Comunicación segura entre estaciones STI-C
5.1.1. Se protegerá la comunicación entre las estaciones STI-C de conformidad con la norma europea ETSI TS 103 097-V1.3.1 y con la norma europea sobre la aplicación de los equipos de pesaje a los STI-C a la que se hace referencia en el punto 4.1.
5.1.2. De conformidad con la Política de certificación para la implantación y el funcionamiento de los sistemas de transporte inteligentes cooperativos que ha adoptado la Comisión, las estaciones STI-C recibirán:
a) una credencial de inscripción de una autoridad de inscripción, que las autorice para operar como estaciones STI-C a efectos del pesaje a bordo;
b) un cierto número de tickets de autorización de una autoridad de autorización que les permita operar en el entorno de los STI-C como parte de los equipos de pesaje.
5.2. Protección contra intentos de violación de la seguridad
La protección en la fase 2 de los equipos de pesaje contra los intentos de violación de la seguridad se aplicará de conformidad con el apéndice del presente anexo.
APÉNDICE DEL ANEXO II
CERTIFICACIÓN DE SEGURIDAD PARA LA FASE 2 DE LOS EQUIPOS DE PESAJE
1. Las unidades de cabina y de remolque deberán llevar una certificación de seguridad con arreglo al sistema de criterios comunes. En el presente apéndice, se hace referencia a las unidades de cabina y de remolque conjuntamente como «unidades vehiculares OBW».
2. Los requisitos mínimos de seguridad que deben cumplir las unidades vehiculares del equipo de pesaje a bordo (unidades vehiculares OBW) se definirán en un objetivo de seguridad («ST») conforme al sistema de criterios comunes.
3. El fabricante del equipo deberá establecer los objetivos de seguridad del equipo que vayan a ser certificados; dichos objetivos deberán ser aprobados por el organismo nacional de certificación de la seguridad de las tecnologías de la información que participa en el Grupo de Trabajo de Interpretación Conjunta (JIWG), grupo que respalda el reconocimiento mutuo de certificados en el marco del acuerdo europeo SOGIS-MRA (Acuerdo sobre el reconocimiento mutuo de certificados de evaluación de la seguridad de las tecnologías de la información del Grupo de Altos funcionarios sobre Seguridad de los Sistemas de Información).
4. La pasarela V2X y el módulo de seguridad de los equipos informáticos de las estaciones STI-C contarán con una certificación de seguridad con arreglo a los perfiles de protección de la pasarela V2X y de los módulos de seguridad de los equipos informáticos que ha desarrollado el consorcio de comunicaciones Car2Car.
5. El nivel de garantía de la certificación de seguridad de las unidades vehiculares OBW será EAL2. No obstante, si se utiliza el tacógrafo como unidad de cabina, dicho tacógrafo se certificará con arreglo a un nivel de garantía EAL4 incrementado por los componentes de garantía ATE_DPT.2 y AVA_VAN.5, según lo establecido en el apéndice 10 del anexo IC del Reglamento (UE) 2016/799.
6. Activos que deben proteger los objetivos de seguridad
Quedarán protegidos los activos siguientes:
a) Mensajes de las unidades vehiculares OBW: cualquier mensaje que envíen o reciban los módulos pertinentes de las unidades vehiculares OBW que recojan información necesaria para el cálculo del peso.
Los módulos OBW pertinentes son las unidades de equipo informático y software dentro de las unidades vehiculares OBW que tratan la información y que, en caso de ser atacadas, pueden provocar que el equipo de pesaje calcule erróneamente el peso total o el peso por eje.
Una unidad vehicular OBW puede ser un único módulo pertinente o estar compuesto por distintos módulos pertinentes, de conformidad con el punto 1.5 del anexo I, en cuyo caso los objetivos de seguridad deberán identificarlos.
b) Mensajes de peso: los mensajes que recojan el peso total o por eje calculado por las unidades vehiculares OBW.
c) Datos de calibrado: la información que se introduce en la memoria de las unidades vehiculares OBW para calibrar el equipo de pesaje.
d) Información de auditoría: la información sobre intentos de violación de la seguridad que correspondan a las amenazas abordadas en el presente apéndice.
e) Software de las unidades vehiculares OBW: los programas informáticos utilizados en las unidades vehiculares OBW para aplicar y apoyar las funciones de los equipos de pesaje que son importantes para el cálculo del peso y la detección de intentos de violación de la seguridad.
Figura 4
Ejemplo de mensajes de unidades vehiculares OBW y de mensajes de peso que deben protegerse en una unidad de cabina compuesta de dos módulos pertinentes

Mensaje de los equipos de pesaje: datos en bruto
Equipo de pesaje de un vehículo de motor
Módulo pertinente 1: recibe el peso por eje y calcula el peso total del vehículo de motor o del conjunto de vehículos
MVU
Mensaje de peso: peso por eje y peso total del vehículo de motor
Estación STI-C
Sensor
Módulo pertinente 2: recibe los datos en bruto de los sensores y calcula el peso por eje de los ejes de los vehículos de motor
Mensaje de peso: peso por eje del vehículo de motor
7. Amenazas que deben abordarse en los objetivos de seguridad
Los objetivos de seguridad deberán abordar las amenazas siguientes:
a) T.OBW-VU_message_spoof: un atacante podría falsificar los mensajes de las unidades vehiculares OBW, de modo que estas unidades calculasen erróneamente el peso total o por eje.
b) T.OBW-VU_message_tamper: un atacante podría manipular los mensajes de las unidades vehiculares OBW, de modo que estas unidades calculasen erróneamente el peso total o por eje.
c) T.Weight_message_spoof: un atacante podría falsificar los mensajes relativos al peso, de modo que se modificase el cálculo del peso realizado por estas unidades.
d) T.Weight_message_tamper: un atacante podría manipular los mensajes relativos al peso, de modo que se modificase el cálculo del peso realizado por estas unidades.
e) T.Audit_spoof: un atacante podría falsificar los mensajes con información sobre auditorías.
f) T.Audit_tamper: un atacante podría manipular los mensajes con información sobre auditorías.
g) T.Calibration_tamper: un atacante podría introducir valores erróneos como datos de calibrado, de modo que las unidades vehiculares OBW calculasen erróneamente el peso.
h) T.Software_tamper: un atacante podría modificar o sustituir el software de las unidades vehiculares OBW para alterar el cálculo normal del peso.
i) T.Stored_Data_tamper: un atacante podría intentar modificar o suprimir la información importante guardada en las unidades vehiculares OBW, lo que incluye la información sobre auditorías.
8. Los objetivos de seguridad relativos a las unidades vehiculares OBW serán los siguientes:
a) O.Plausibility_validation: las unidades vehiculares OBW verificarán que la información procedente de un mensaje entrante dirigido a un módulo pertinente, ya sean los sensores o cualquier otro módulo, es fiable por ser plausible.
b) O.OBW-VU_stored_information_protection: las unidades vehiculares OBW deberán ser capaces de proteger el software y los datos guardados frente a las manipulaciones.
c) O.Notification: las unidades vehiculares OBW deberán poder notificar un intento de violación de la seguridad.
9. Justificación
a) El mensaje «T.OBW-VU_message_spoof» está dirigido por O.Plausibility_validation y por O.Notification.
b) El mensaje «T.OBW-VU_message_tamper» está dirigido por O.Plausibility_validation y por O.Notification.
c) El mensaje «T.Weight_message_spoof» está dirigido por O.Plausibility_validation y por O.Notification.
d) El mensaje «T.Weight_message_tamper» está dirigido por O.Plausibility_validation y por O.Notification.
e) El mensaje «T.Audit_spoof» está dirigido por O.Plausibility_validation y por O.Notification.
f) El mensaje «T.Calibration_tamper» está dirigido por O.Plausibility_validation y por O.Notification.
g) El mensaje «T.Software_tamper» está dirigido por O.OBW-VU_stored_information_protection y por O.Notification.
h) El mensaje «T.Stored_data_tamper» está dirigido por O.OBW-VU_stored_information_protection y por O.Notification.
Cuadro 1
Justificación de los objetivos de seguridad
|
|
O.Plausibility_validation |
O.OBW-VU_stored_information_protection |
O.Notification |
|
T.OBW_message_spoof |
X |
|
X |
|
T.OBW_message_tamper |
X |
|
X |
|
T.Weight_message_spoof |
X |
|
X |
|
T.Weight_message_tamper |
X |
|
X |
|
T.Audit_spoof |
X |
|
X |
|
T.Audit_tamper |
X |
|
X |
|
T.Calibration_tamper |
X |
|
X |
|
T.Software_tamper |
|
X |
X |
|
T.Stored_data_tamper |
|
X |
X |
1. En el presente anexo, que complementa el apéndice 14 del anexo IC del Reglamento (UE) 2016/799 (en adelante, «el apéndice 14»), se especifican los requisitos para la preparación y transferencia de datos OWS desde el vehículo de motor hasta el lector de comunicación de teledetección temprana («lector de comunicación» o «REDCR»).
2. Transferencia de datos del sistema de pesaje a bordo («datos OWS») en la fase 1 de los equipos de pesaje
2.1. La unidad de cabina (MVU) facilitará datos OWS a la unidad vehicular de comunicaciones dedicadas de corto alcance («unidad vehicular DSRC»).
2.2. La unidad de cabina deberá:
|
2.2.1. |
constituir los datos OWS con la información facilitada por ella misma y recibida de las unidades de remolque, de acuerdo con la estructura establecida en el punto 6; |
|
2.2.2. |
reenviar los datos OWS a la unidad vehicular DSRC para su posterior transmisión al lector de comunicación. |
Figura 5
Transmisión de datos OWS de la unidad de cabina al lector de comunicación (REDCR) en la fase 1 de los equipos de pesaje
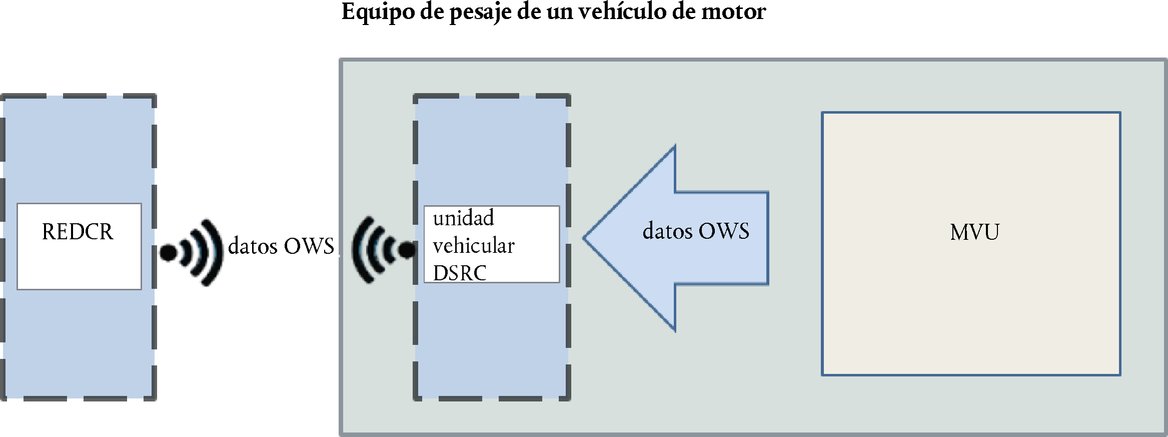
unidad vehicular DSRC
Equipo de pesaje de un vehículo de motor
datos OWS
datos OWS
MVU
REDCR
3. Transferencia de datos OWS en la fase 2 de los equipos de pesaje
3.1. La estación STI-C de la cabina facilitará los datos OWS a la unidad vehicular DSRC.
Figura 6
Transmisión de datos OWS desde la estación STI-C al lector de comunicación (REDCR) en la fase 2 de los equipos de pesaje
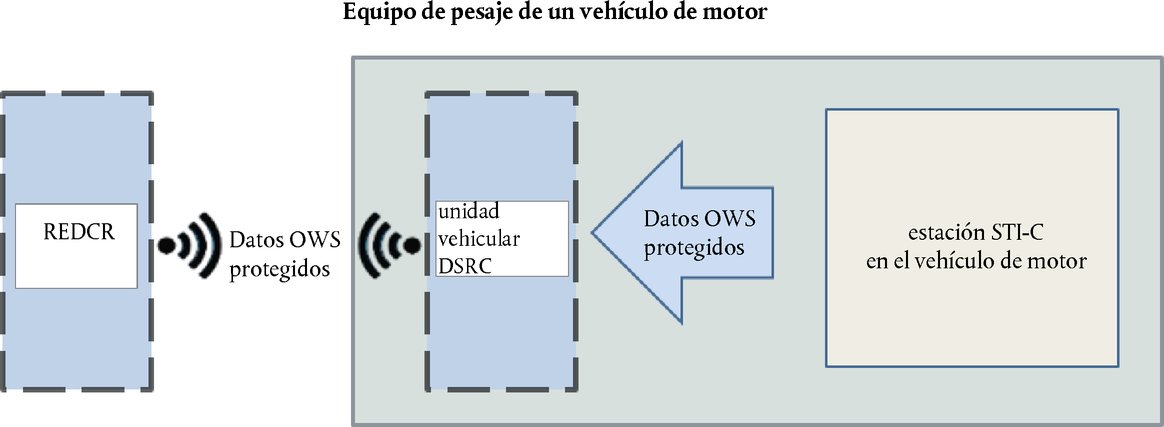
unidad vehicular DSRC
Datos OWS protegidos
Equipo de pesaje de un vehículo de motor
Datos OWS protegidos
estación STI-C en el vehículo de motor
REDCR
3.2. La estación STI-C de la cabina deberá:
|
3.2.1. |
constituir los datos OWS con la información recibida de la unidad de cabina y de la estación STI-C relativa a los remolques o semirremolques que se estén remolcando, de acuerdo con la estructura establecida en el punto 6; |
|
3.2.2. |
proteger los datos OWS según lo establecido en el punto 8, y |
|
3.2.3. |
reenviar los datos OWS a la unidad vehicular DSRC para su posterior transmisión al lector de comunicación. |
4. La transferencia de datos entre la unidad vehicular DSRC y, o bien la unidad de cabina (fase 1) o la estación STI-C de la cabina (fase 2) se ejecutará según lo establecido en el punto 5.6 del apéndice 14, donde se entenderá que la unidad vehicular es la unidad de cabina o la estación STI-C, dependiendo de la fase.
5. Comunicación entre la unidad vehicular DSRC y el lector de comunicación
5.1. La comunicación entre la unidad vehicular DSRC y el lector de comunicación se llevará a cabo a través de la interfaz definida por las normas CEN DSRC EN 12253, EN 12795, EN 12834, EN 13372 e ISO 14906, conforme a la Directiva 96/53/CE del Consejo.
5.2. El protocolo de transacción para descargar datos OWS a través del enlace de interfaz DSRC de 5,8 GHz será el mismo que el utilizado para los datos RTM que figura en el punto 5.4.1 del apéndice 14; la única diferencia es que el identificador de objetos que se refiere a la norma ISO 15638, relativa a vehículos comerciales de carga regulados (TARV), deberá ajustarse a la parte 20 de dicha norma en relación con los datos OWS de los equipos de pesaje a bordo (WOB/OWS).
5.3. Los comandos utilizados para las transacciones OWS serán los mismos que los establecidos en el punto 5.4.2 del apéndice 14 respecto a las transacciones RTM.
5.4. La secuencia de comandos de interrogación para los datos OWS será la misma que la establecida en el punto 5.4.3 del apéndice 14 respecto a los datos RTM.
5.5. El mecanismo de transferencia de datos y la descripción de las transacciones DSRC serán los mismos que los establecidos en los puntos 5.4.6 y 5.4.7 del apéndice 14. No obstante, el cuadro de servicios del vehículo deberá adaptarse para la transmisión de datos OWS. Por consiguiente, la marca «Rtm-ContextMark» se sustituirá por una marca «Ows-ContextMark», cuyo identificador de objetos deberá remitir a la parte 20 de la norma ISO 15638, relativa a vehículos comerciales de carga regulados (TARV), en relación con los datos OWS de los equipos de pesaje a bordo (WOB/OWS).
5.6. Los parámetros de la interfaz física DSRC serán los mismos que los establecidos en el punto 5.3 del apéndice 14.
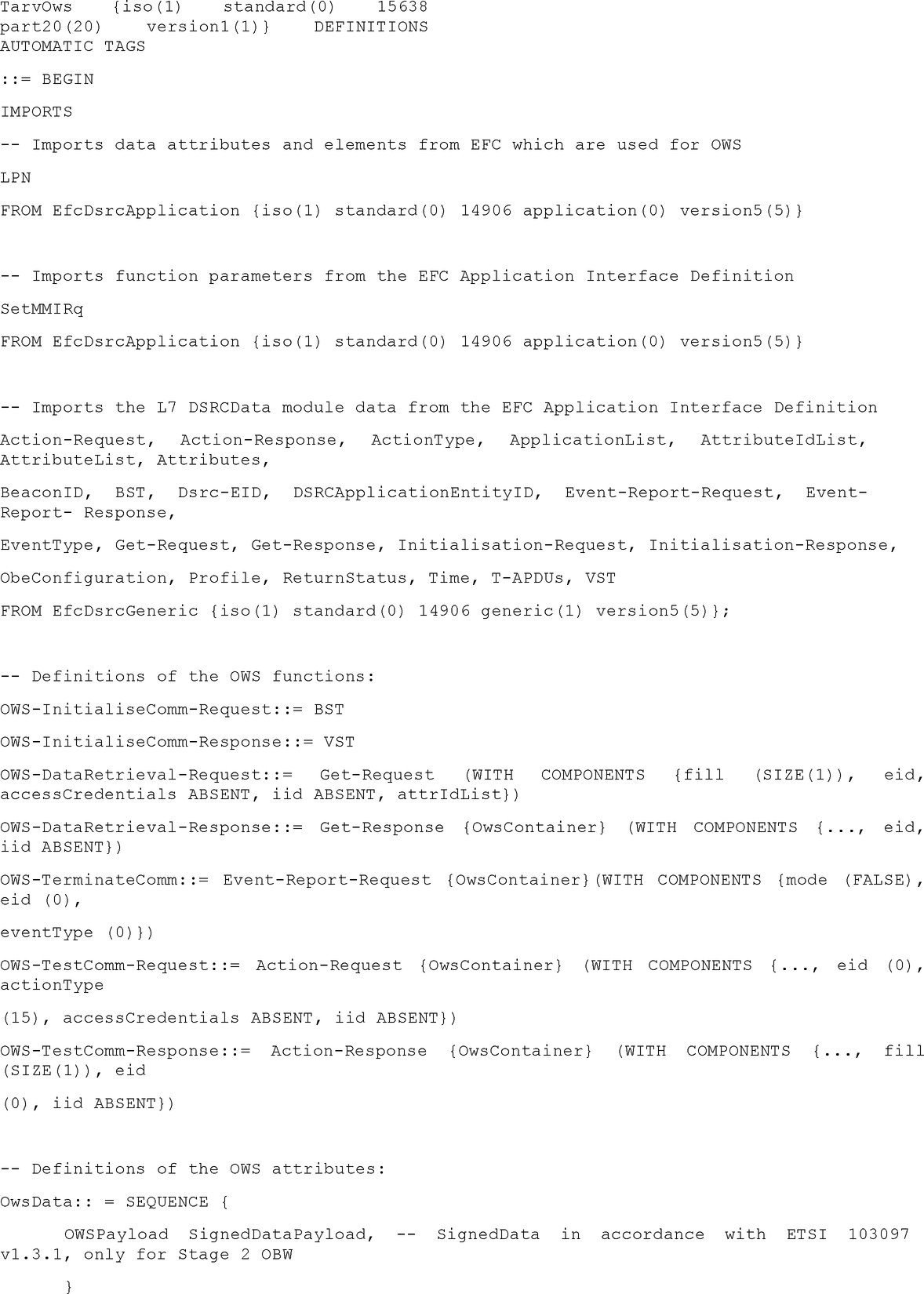
6. Estructura de los datos
La definición del módulo ASN.1 para los datos DSRC dentro de la aplicación de los sistemas de pesaje a bordo (OWS) se establece del modo siguiente:

7. Elementos de datos OWS, acciones realizadas y definiciones:
Los datos OWS serán calculados por la unidad de cabina (fase 1) o la estación STI-C de la cabina (fase 2) de acuerdo con el cuadro 1.
Cuadro 1
Elementos de los datos OWS, acciones realizadas y definiciones
|
Elemento de datos OWS |
Acción realizada por la estación STI-C de la cabina |
Observaciones |
Definición de ASN.1 de los datos |
|
OWS1 Peso total |
Se generará un valor entero. |
Peso total medido en último lugar |
recordedWeight INTEGER (0..65535) |
|
OWS2 Masa máxima en carga técnicamente admisible |
Se generará un valor entero. |
Masa máxima en carga técnicamente admisible que haya declarado el fabricante |
maximumTechnicalWeight INTEGER (0..65535) |
|
OWS3 Configuración de los ejes del vehículo |
Se generará una cadena de octetos cuaternaria. |
Configuración de los ejes |
axlesConfiguration CADENA DE OCTETOS CUATERNARIA |
|
OWS4 Peso por eje |
Se generará una cadena de octetos de 26 elementos. |
Peso por eje |
axlesRecordedWeight CADENA DE OCTETOS DE 26 ELEMENTOS |
|
OWS5 Peso total registrado en el tiempo |
Se generará un valor entero. El valor de OWS2 se fijará en el momento en que se esté registrando el peso total. |
Marca temporal (Timestamp) del peso que se esté registrando en un momento dado |
tp15638Timestamp INTEGER (0..4294967295), |
|
OWS6 Error de comunicación DSRC |
Se generará un valor booleano. Se asignará un valor «TRUE» a la variable «tp15638DSRCcommunicationError» si el equipo de pesaje ha detectado al menos un incidente del tipo de comunicación de error con la unidad vehicular DSRC en los últimos 30 días. De lo contrario, si no se han registrado incidentes en los últimos 30 días, se asignará un valor «FALSE». |
1 valor «TRUE» indica un error de comunicación entre el equipo de pesaje y la unidad vehicular DSRC en los últimos 30 días |
tp15638DSRCcommunicationError BOOLEANO |
|
OWS7 Error de comunicación de un equipo de pesaje |
Se generará un valor booleano. Se asignará un valor «TRUE» a la variable «tp15638CommunicationError» si el equipo de pesaje ha detectado al menos un incidente del tipo de comunicación de error dentro del equipo de pesaje en los últimos 30 días. De lo contrario, si no se han registrado incidentes en los últimos 30 días, se asignará un valor «FALSE». |
1 valor «TRUE» indica un error de comunicación en el equipo de pesaje en los últimos 30 días |
tp15638OBWCommunicationError, BOOLEANO |
|
OWS8 Intento de violación de la seguridad |
Se generará un valor booleano. Se asignará un valor «TRUE» a la variable «tp15638SecurityBreachAttempt» si el equipo de pesaje ha detectado en los últimos 2 años al menos un incidente del tipo de intento de violación de la seguridad. De lo contrario, si no se han registrado incidentes del tipo de intento de violación de la seguridad en los últimos 2 años, se asignará un valor «FALSE». |
1 valor «TRUE» indica un intento de violación de la seguridad del equipo de pesaje en los últimos 2 años |
tp15638SecurityBreachAttempt BOOLEANO |
donde:
a) «recordedWeight» representa el peso total del vehículo o del conjunto de vehículos medido con una resolución de 10 kg según se define en la norma EN ISO 14906. Por ejemplo, un valor de 2 500 representa un peso de 25 toneladas.
b) «axlesConfiguration» representa la configuración del vehículo o del conjunto de vehículos como número de ejes.
La configuración se define con la máscara de 20 bits (ampliada a partir de la norma EN ISO 14906).
Una máscara de 2 bits representa la configuración de un eje con el formato siguiente:
— el valor 00B significa que el valor «no está disponible» porque el vehículo no está dotado de ningún equipo para obtener el peso por eje;
— el valor 01B significa que el eje no está presente;
— el valor 10B significa que el eje está presente, que se ha calculado y obtenido el peso y que aparece en el campo «axlesRecordedWeight field»;
— el valor 11B se reserva para usos futuros.
Los 6 últimos bits se reservan para usos futuros (RUF).
Cuadro 2
Distribución de bits para OWS2
Número de ejes
Número de ejes en la unidad de tracción
Número de ejes en el remolque
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
00/01/10/11
RUF (6 bits)
c) «axlesRecordedWeight» representa el peso específico registrado en relación con cada eje con una resolución de 10 kg. Se utilizan dos octetos para cada eje. Por ejemplo, un valor de 150 representa un peso de 1 500 kg.
d) «maximumTechnicalWeight» representa la masa máxima en carga técnicamente admisible del vehículo o de la configuración del vehículo que haya declarado el fabricante. Este valor solo se facilitará en la fase 2. Para la fase 1, se asignará un valor de 0.
8. Firma de datos OWS
8.1. Los datos OWS no se firmarán en la fase 1; el texto simple de los datos OWS se transferirá desde la unidad de cabina a la unidad vehicular DSRC.
8.2. En la fase 2, los datos OWS se firmarán en la estación STI-C de la cabina y se transferirán desde dicha estación a la unidad vehicular DSRC con arreglo a las disposiciones siguientes:
|
8.2.1. |
La estructura de datos protegida se construirá de acuerdo con lo establecido en los puntos 5.1 y 5.2 de la norma ETSI TS 103 097-V1.3.1. |
|
8.2.2. |
Los datos del tipo «SignedData» a los que se refiere el punto 5.2 de la norma ETSI TS 103 097-V1.3.1 estarán sujetos a las restricciones siguientes: a) El tipo «HashAlgorithm» se fijará en «sha256». b) El tipo «SignerIdentifier» se fijará en «digest». c) El tipo «SignedDataPayload» será el de los datos OWS, según lo establecido en el punto 7. d) Se restringirá el tipo «HeaderInfo» para disponer de los encabezamientos de seguridad siguientes: — El componente «psid» equivaldrá a 0. — El componente «generationTime» será tal como se define en la norma IEEE Std 1609.2. — No estará presente el componente «expiryTime». — No estará presente el componente «generationLocation». — No estará presente el componente «p. 2pcdLearningRequest». — No estará presente el componente «missingCrlIdentifier». — No estará presente el componente «encryptionKey». — No estará presente el componente «inlineP2pcdRequest». — No estará presente el componente «requestedCertificate». |
|
8.2.3. |
La definición ASN.1 de módulo para la firma de tipo será la siguiente: 
|
|
8.2.4. |
El certificado de firma será el certificado que figure en el ticket de autorización que utilice la estación STI-C para sus transacciones con el lector de comunicación, de conformidad con el punto 6 de la norma ETSI TS 103 097-V1.3.1. |
|
8.2.5. |
Al recibir el mensaje, el lector de comunicación verificará el certificado y utilizará la clave pública incluida en dicho certificado para leer la firma de los datos OWS. |
9. El protocolo de aplicación y el tratamiento de errores respecto a los datos OWS serán los mismos que los establecidos en los puntos 5.6.2 y 5.7 del apéndice 14.
10. Durante la fase 2, los datos OWS también podrán notificarse directamente al lector de comunicación del organismo supervisor mediante la estación STI-C de la cabina en lugar de a través de la unidad vehicular DSRC. En ese caso, el lector de comunicación será también una estación STI-C.
1. Los equipos de pesaje a bordo (OBW) deberán someterse a inspecciones periódicas, en las que se pesará el vehículo o el conjunto de vehículos en dispositivos de pesaje certificados de conformidad con el artículo 5, apartado 2, letra b), del presente Reglamento, como las básculas portátiles o las básculas puente.
2. Deberá someterse a inspecciones a los vehículos siguientes:
a) los vehículos de motor;
b) los remolques y semirremolques que constituyan una unidad de remolque (TU).
3. Los remolques y semirremolques que estén sujetos a una inspección con arreglo al punto 2 deberán someterse a la inspección incorporados a un vehículo de motor. Los vehículos de motor destinados a remolcar semirremolques se someterán a la inspección con un semirremolque incorporado.
4. La inspección periódica consistirá en:
a) un ensayo de tres cargas, que se llevará a cabo dos años después de la fecha de matriculación del vehículo y, posteriormente, cada cuatro años;
b) un ensayo de carga única, que se llevará a cabo dos años después de la fecha del ensayo de tres cargas y, posteriormente, cada cuatro años;
Cuadro 3
Secuencia de realización de las inspecciones periódicas
|
Ensayo |
Tres cargas |
Carga única |
Tres cargas |
Carga única |
Tres cargas |
Carga única |
Tres cargas |
... |
|
Años después de la fecha de matriculación del vehículo |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
... |
5. Ensayo de tres cargas
Se realizará el ensayo de las tres cargas, en el que se carga el vehículo con tres cargas diferentes, cuyos valores se calcularán como sigue:
a) una carga de entre el 45 % y el 55 % de la masa máxima en carga técnicamente admisible del vehículo;
b) una carga de entre el 65 % y el 75 % de la masa máxima en carga técnicamente admisible del vehículo;
c) una carga de entre el 90 % y el 100 % de la masa máxima en carga técnicamente admisible del vehículo.
6. Se efectuará un ensayo de carga única, en el que se cargará el vehículo con una carga que represente al menos el 90 % de la masa máxima en carga técnicamente admisible del vehículo.
7. En el caso de los remolques y semirremolques que constituyan una unidad de remolque y de los vehículos de motor destinados a arrastrar un semirremolque, las cargas contempladas en los puntos 5 y 6 se calcularán en relación con la masa máxima en carga técnicamente admisible del conjunto de vehículos.
8. Disposiciones específicas para los equipos de pesaje dinámicos
8.1. Si la masa máxima en carga técnicamente admisible del vehículo o del conjunto de vehículos supera el peso máximo autorizado, las cargas indicadas en los puntos 5 y 6 se calcularán con respecto al peso máximo autorizado.
8.2. Para obtener un valor de carga del equipo de pesaje, el vehículo o conjunto de vehículos se conducirá a una cierta distancia en condiciones precisas que deberán especificarse en las directrices del fabricante.
9. Se considerará que se ha producido un fallo en la inspección cuando:
a) el valor de carga indicado por el equipo de pesaje correspondiente a la carga de entre el 90 % y el 100 % de la masa máxima en carga técnicamente admisible al que se refiere el punto 5, letra c), no se ajuste a los valores medidos por el dispositivo de pesaje certificado con el nivel de exactitud establecido en el punto 8 del anexo I, y
b) los valores de carga indicados por el equipo de pesaje correspondientes a las cargas entre el 45 % y el 55 %, y entre el 65 % y el 75 % de la masa máxima en carga técnicamente admisible, a los que se refiere el punto 5, letras a) y b), no se ajuste a los valores medidos por el dispositivo de pesaje certificado con un nivel o una exactitud del ± 15 %.
10. Cuando se haya producido un fallo en la inspección, se someterá al equipo de pesaje a otra inspección a más tardar dos meses después de la fecha de la anterior.
11. Flexibilidad en lo concerniente a las inspecciones periódicas:
Con el fin de facilitar la realización de inspecciones periódicas de tipos específicos de vehículos, y a efectos de reducir las repercusiones de las inspecciones periódicas en las actividades ordinarias de los conductores y los transportistas, los Estados miembros podrán considerar la aplicación de las siguientes medidas de flexibilidad en lo tocante a los vehículos matriculados en su territorio:
a) los tres valores de carga mencionados en el punto 5 podrán obtenerse a lo largo de un período de tres meses;
b) el pesaje real de los vehículos podrá llevarse a cabo con dispositivos de pesaje certificados que no formen parte de las instalaciones de los talleres de equipos OBW contemplados en el artículo 5 del presente Reglamento, siempre que la operación de pesaje esté bajo la supervisión del personal de un taller de equipos OBW; en tal caso, el propietario del vehículo deberá demostrar a dicho taller que el pesaje se ha realizado con un dispositivo de pesaje certificado;
c) en el caso de los vehículos o conjunto de vehículos cuya configuración específica impida técnicamente superar el peso máximo autorizado (por ejemplo, los camiones cisterna), las cargas a las que se hace referencia en los puntos 5 y 6 podrán tener otros valores; en lo que respecta al ensayo de las tres cargas, la diferencia entre dos cargas consecutivas será, como mínimo, de un 15 % del peso máximo autorizado.
Agencia Estatal Boletín Oficial del Estado
Avda. de Manoteras, 54 - 28050 Madrid




