Butlletí Oficial de l'Estat






Contingut no disponible en valencià
El Real Decreto 448/2020, de 10 de marzo, sobre caracterización y registro de la maquinaria agrícola, tiene entre sus fines impulsar el establecimiento de unas pruebas voluntarias de calidad basadas en la aplicación de determinados procedimientos técnicos para verificar la eficiencia energética, en su caso, y el cumplimiento de normas de diseño, eficiencia agronómica y de protección ambiental.
El artículo 11 de dicho real decreto dispone que el Ministerio de Agricultura, Pesca y Alimentación establecerá marcas de calidad para tractores y máquinas agrícolas, de acuerdo con las normas nacionales e internacionales o procedimientos de aplicación determinados por este, respecto de sus prestaciones, eficiencia agronómica, y de protección ambiental. Además, se establece que la aplicación de dichas normas y procedimientos se determinará mediante orden ministerial.
Asimismo, el artículo 12 establece el procedimiento para la obtención de las marcas de calidad que incluye el registro de los fabricantes, la solicitud de ensayo, la designación de los laboratorios de ensayo, la realización de los ensayos y la evaluación de los ensayos y la certificación.
Por último, el artículo 14 regula el uso de las marcas de calidad.
Mediante la presente orden se establece la marca de calidad para los sistemas de autoguiado utilizados en máquinas agrícolas y forestales y se determina su procedimiento de aplicación y ensayo.
En la tramitación de esta orden, se ha efectuado el trámite de consulta a las comunidades autónomas y a las entidades del sector afectadas y, en cumplimiento de lo previsto en el artículo 26.6 de la Ley 50/1997, de 27 de noviembre, del Gobierno, la orden se ha sometido al trámite de audiencia e información públicas.
Esta orden se dicta de acuerdo con lo previsto en la disposición final segunda, apartado 1, del Real Decreto 488/2020, de 10 de marzo, que habilita al Ministro de Agricultura, Pesca y Alimentación para dictar las disposiciones que sean necesarias para la aplicación de dicho real decreto, en relación con el artículo 11 del mismo.
Asimismo, se dicta al amparo de lo dispuesto en el artículo 149.1.13.ª y 21.ª de la Constitución Española, que atribuye al Estado la competencia exclusiva en materia de bases y coordinación de la planificación general de la actividad económica, y de tráfico y circulación de vehículos de motor, respectivamente.
En la elaboración de esta norma se han observado los principios de buena regulación previstos en el artículo 129 de la Ley 39/2015 de 1 de octubre, del Procedimiento Administrativo Común de las Administraciones Públicas. Los principios de necesidad y eficacia puesto que la norma resulta el instrumento más indicado para los intereses que se persiguen; el principio de proporcionalidad ya que contiene la regulación imprescindible para atender a las necesidades que se pretenden cubrir; y el principio de seguridad jurídica ya que es coherente con el resto del ordenamiento jurídico nacional y de la Unión Europea. Por lo demás, la norma es coherente con los principios de eficiencia, en tanto que la norma asegura la máxima eficacia de sus postulados con los menores costes posibles inherentes a su aplicación, contemplándose las mínimas cargas posibles y evitándose cargas innecesarias, y transparencia, al haberse garantizado una amplia participación en su elaboración.
En su virtud, dispongo:
El objeto de la presente orden es establecer la marca de calidad para los sistemas de autoguiado utilizados en máquinas agrícolas y forestales, y determinar su procedimiento de aplicación y ensayo.
Los sistemas que opten a la marca de calidad deberán disponer de su correspondiente marcado CE y declaración de conformidad CE como garantía de calidad y cumplimiento con el marco legislativo de la Unión Europea.
1. A los efectos de esta orden, se entiende por sistemas de autoguiado aquellos basados en el sistema global de navegación por satélite (Global Navigation Satellite System, por sus siglas en inglés, GNSS) que permiten una conducción autónoma o semiautónoma de maquinaria agrícola y forestal, optimizando la precisión en las operaciones de siembra, fertilización y cosecha, reduciendo solapes y omisiones.
2. Asimismo, serán de aplicación las definiciones previstas en el punto 1.1 del anexo I.
1. Se establece la marca de calidad para los sistemas de autoguiado de acuerdo con los artículos 11, 12, 13 y 14 del Real Decreto 448/2020, de 10 de marzo, sobre caracterización y registro de la maquinaria agrícola.
2. El procedimiento de aplicación y ensayo queda recogido en el anexo I.
3. Los sistemas de autoguiado («automated guidance system», por sus siglas en inglés, AGS) que hayan obtenido calificación en el ámbito de las marcas de calidad de autoguiado se incluirán en una lista global y pública, indicando su calificación, marca y modelo del AGS y de sus componentes (al menos: receptor de señal de sistema global de navegación por satélite (GNSS) o antena, controlador, actuador sobre la dirección y sensores de posición de las ruedas) y corrección de señal. Además, se especificará el tipo, denominación comercial, variante y versión del tractor o máquina; así como otros datos de ensayo relevantes y el número de informe. En el mismo sentido, se emitirá un certificado en los términos recogidos en el artículo 14 y en el anexo IX del Real Decreto 448/2020, de 10 de marzo.
4. Existirán dos grupos de evaluación según la tecnología de la que disponga el sistema de autoguiado: centimétrico o submétrico. Esta diferenciación aparecerá en el informe de ensayo y en el logotipo de marca de calidad. El fabricante declarará el tipo de tecnología y la corrección a emplear en su solicitud de ensayo.
5. El formato de informe y de certificado se publicará en el portal de internet https://www.mapa.gob.es/es/.
6. El logotipo de marca de calidad deberá reproducirse de forma homotética con el indicado en el anexo IX del Real Decreto 448/2020, de 10 de marzo, y contendrá la información que se detalla en el anexo II.
El establecimiento de la marca de calidad no supondrá incremento alguno del gasto público, atendiéndose con los medios personales y materiales existentes en el Ministerio de Agricultura, Pesca y Alimentación.
Esta orden se dicta al amparo de lo dispuesto en el artículo 149.1, reglas 13.ª y 21.ª de la Constitución Española, que atribuyen al Estado la competencia exclusiva en materia de, respectivamente, bases y coordinación de la planificación general de la actividad económica, y de tráfico y circulación de vehículos de motor.
La presente orden ministerial entrará en vigor el día siguiente al de su publicación en el «Boletín Oficial del Estado».
Madrid, 5 de diciembre de 2025.–El Ministro de Agricultura, Pesca y Alimentación, Luis Planas Puchades.
1. Metodología para realizar los ensayos de los Sistemas de autoguiado basados en GNSS según su error dinámico y estático
La evaluación tiene en cuenta el error dinámico o de pasada a pasada y el error estático o de repetitividad de cada sistema de autoguiado. Calcula la clase del 95 % para dicho sistema y mediante los baremos establecidos se le otorga una calificación u otra (excelente, muy buena o buena).
La clase del 95 % para el error de pasada a pasada y para el error de repetitividad de cada sistema de autoguiado se calcula a partir de datos obtenidos en los ensayos parciales efectuados según el procedimiento para sistemas de autoguiado basados en GNSS, y realizados por un laboratorio oficial de ensayos designado bajo el sistema de marcas de calidad en máquinas agrícolas. Para la redacción de este procedimiento se ha tomado como base la norma ISO 12188-2:2012 Tractors and machinery for agriculture and forestry – Test procedures for positioning and guidance systems in agriculture – Part 2: Testing of satellite-based auto-guidance systems during straight and level travel.
1.1 Términos y definiciones.
Ensayo parcial: prueba compuesta por al menos tres repeticiones a una velocidad objetivo.
Ensayo completo: conjunto de los ensayos parciales. Para tractores consta de tres ensayos parciales en recta y dos en curva y para otras máquinas de uno en recta y otro en curva.
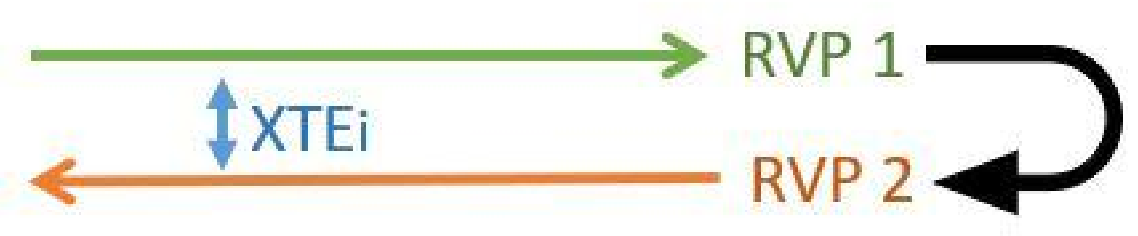
XTE: error relativo perpendicular a la trayectoria (relative cross-track error).
RVP: punto de referencia fijo representativo de la posición del vehículo (representative vehicle point).
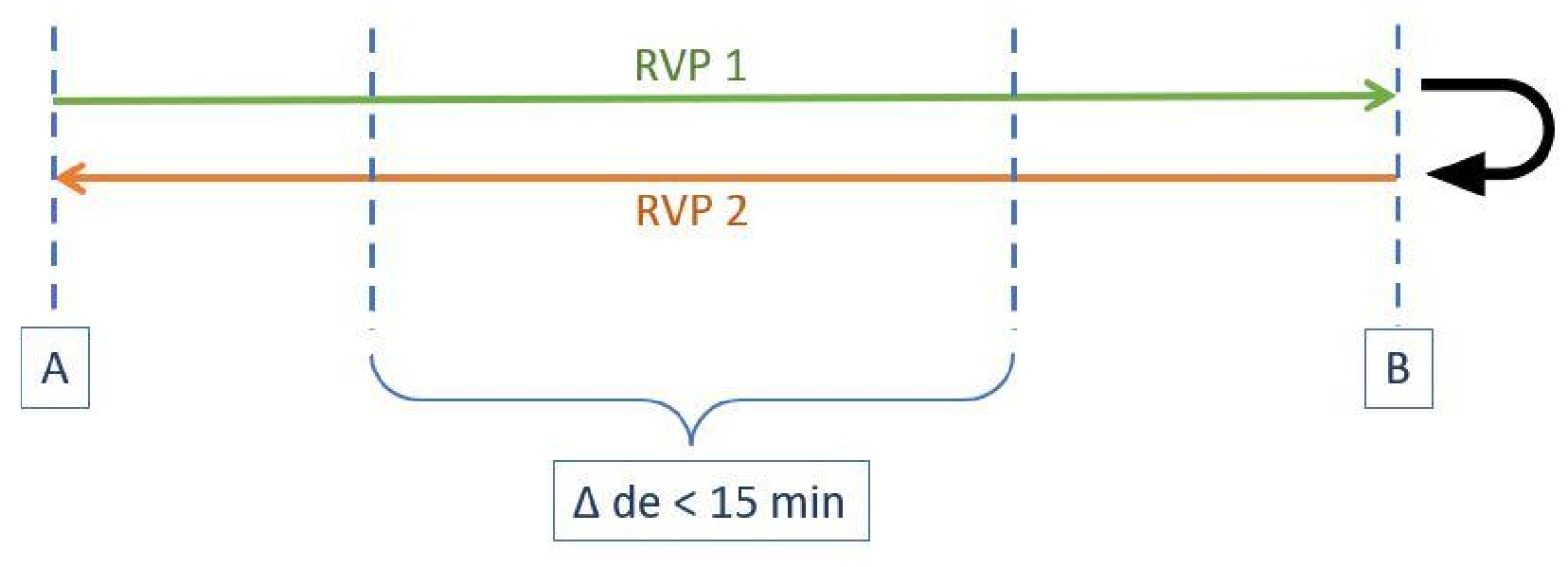
Trayectoria A-B: línea o curva preestablecida en la pista que une el punto A con el punto B, en la que se recogen las posiciones del RVP para cada una de las repeticiones.
Repetición: pareja de pasadas (ida y vuelta) sobre la trayectoria A-B, para calcular los XTE.
Pasada: conducción autoguiada a lo largo de la trayectoria A-B en un sentido.
1.2 Error de pasada a pasada y error de repetitividad.
Los errores (XTE) son las desviaciones laterales del punto de referencia del vehículo (RVP) con respecto a una posición esperada del RVP determinada por la pasada anterior, es decir, la distancia perpendicular a la trayectoria entre posiciones emparejadas del RVP, resultante de la conducción en sentidos opuestos dentro de una misma repetición.
1.2.1 Error de pasada a pasada.
Este error se obtiene cuando el tiempo transcurrido entre la captura de las posiciones emparejadas del RVP es menor a 15 min.
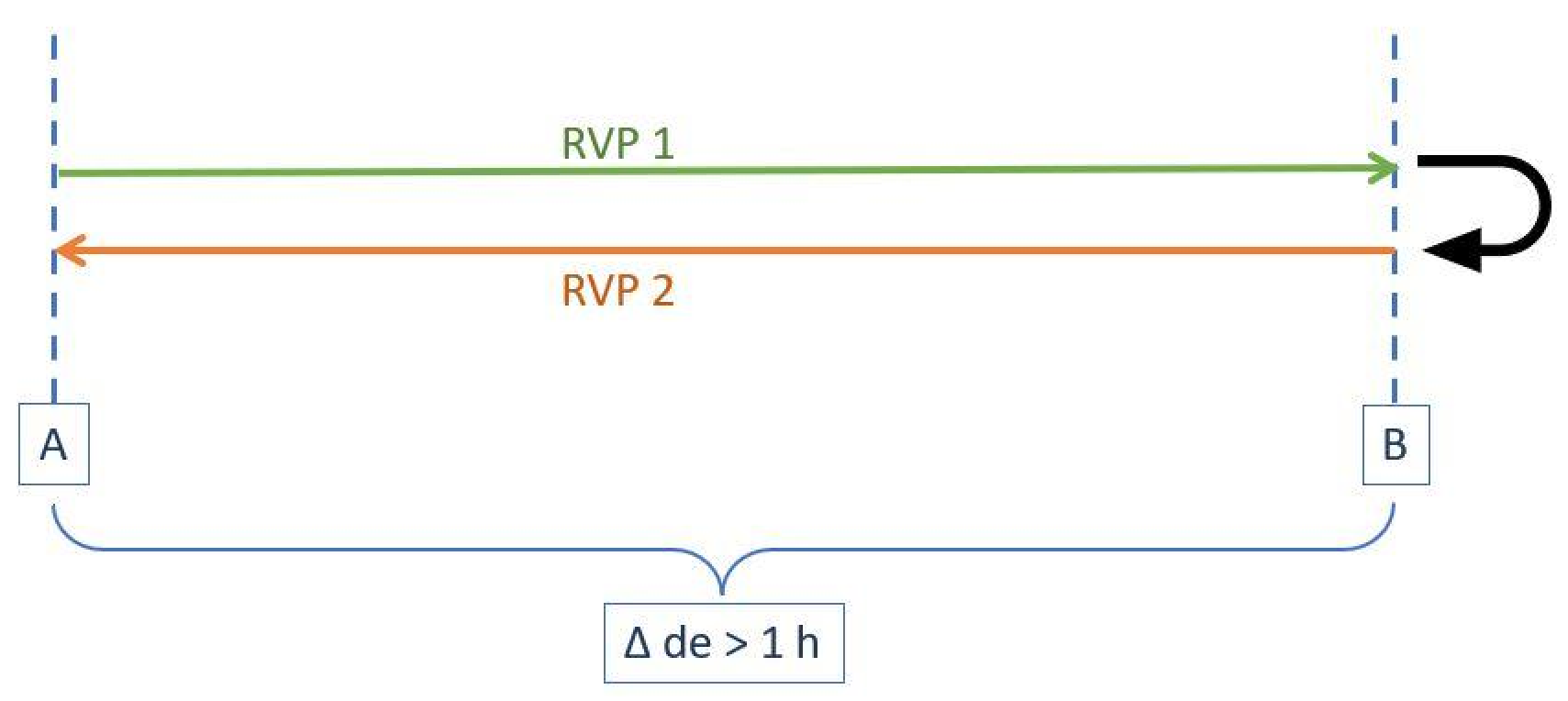
1.2.2 Error de repetitividad.
Este error se obtiene cuando el tiempo transcurrido entre la captura de las posiciones emparejadas del RVP es mayor a 60 min.
1.3 Obtención de las posiciones del RVP para el cálculo de errores.
Se realizan los ensayos tomando como referencia la norma ISO 12188-2:2012, para sistemas de autoguiado basados en GNSS. De igual manera, la recopilación, tratamiento y procesado de los datos obtenidos durante las diferentes partes de los ensayos tienen como base la norma ISO 12188-2:2012.
1.3.1 Preparación/requisitos previos de los ensayos parciales.
Se contará con una pista recta, de al menos 100 m y una pendiente longitudinal máxima de 1 % y una pista curva consistente en una semicircunferencia de longitud entre 70 y 100 m y una pendiente longitudinal máxima de 1 %. Como sistema de referencia se utilizará un sistema de seguimiento con una precisión de un orden de magnitud igual o superior al del sistema de posicionamiento GNSS del vehículo con sistema de autoguiado («automatic guided vehicle system» por sus siglas en inglés AGVS) y una frecuencia de muestreo suficiente, por ejemplo 1 Hz.
Se determinará el RVP: seleccionando un punto fijo representativo de la posición del vehículo, el cual queda a su vez definido por la posición del prisma, receptor GNSS, etc. y se establecerá la trayectoria A-B al menos 1 hora antes del comienzo de los ensayos parciales en pista.
1.3.2 Toma de datos.
1.3.2.1 Velocidades de ensayo.
a. Para tractores:
i1 LENTA: 1 ± 0,18 km/h.
ii1 MEDIA: 7 ± 0,72 km/h.
iii1 RÁPIDA: 15 ± 0,72 km/h.
b. Para otras máquinas:
i1 Cosechadoras de cereal - MEDIA: 7 ± 0,72 km/h.
ii1 Aplicadores de tratamientos fitosanitarios autopropulsados - RÁPIDA: 15 ± 0,72 km/h.
iii1 Otras máquinas - velocidad media habitual de trabajo para cada tipo de máquina, que será establecida por el laboratorio de ensayo y con máximo de 15 km/h.
1.3.2.2 Partes del ensayo completo.
El ensayo completo para tractores está formado por cinco ensayos parciales. Tres ensayos parciales en recta a velocidad lenta, media y rápida respectivamente y dos ensayos parciales en curva a velocidad lenta y media. Para otras máquinas se reducen a dos: uno en recta y otro en curva, atendiendo a las velocidades indicadas en el apartado anterior.
Para cada ensayo parcial se obtendrán los errores de pasada a pasada y de repetitividad.
1.3.2.3 Procedimiento del ensayo parcial.
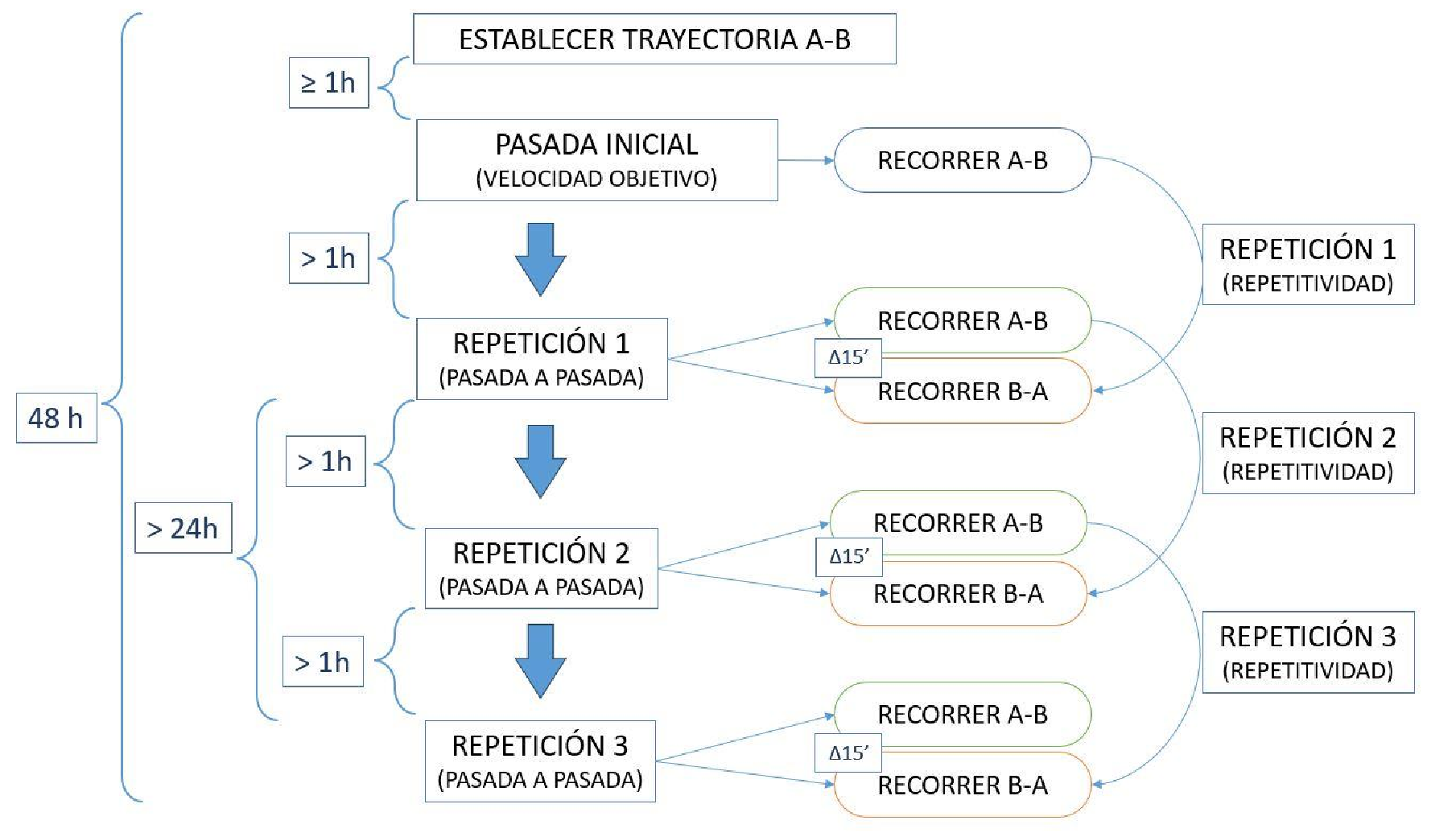
La trayectoria A-B se establece al menos 1 h antes de la primera repetición. Se puede grabar/registrar mediante método de conducción manual o introduciendo las coordenadas geográficas.
Cada ensayo parcial tendrá una velocidad objetivo (ver apartado 1.3.2.1) y estará compuesto por al menos 3 repeticiones. Cada repetición tendrá una configuración de constelación satelital diferente. Todas las repeticiones deberán realizarse a lo largo de 48 h consecutivas.
El tiempo de inicio de cada repetición debe ser aleatoriamente asignado, pero manteniéndose intervalos de más de 1 h entre repeticiones consecutivas. Dos repeticiones no se llevarán a cabo cuando la constelación GNSS este repetida, por ello, es necesario que haya más de 1 día entre la primera y la última repetición.
Cada repetición consiste en un conjunto de pasadas emparejadas con una distribución homogénea de tiempo de revisita (regreso) para los pares de posiciones del RVP seleccionados para el cálculo del valor de XTE.
– En pasada a pasada. El limitante es el tiempo de revisita, por lo que habrá que tener en cuenta a la hora de seleccionar parejas de posiciones RVP validas aquellas con un tiempo de revisita de menos de 15 min.
– En repetitividad. El limitante es el tiempo de revisita, por lo que habrá que tener en cuenta a la hora de seleccionar parejas de posiciones RVP validas aquellas con un tiempo de revisita de más de 1 h.
Cada repetición debe realizarse a revoluciones constantes de motor, con una configuración en el vehículo como si se estuviera realizando una labor en campo.
No están permitidas actuaciones del operador cuando se recorre el segmento de pista donde los datos son registrados.
Todos los datos válidos recogidos durante el ensayo parcial se usarán para calcular los errores relativos (XTE: en error de pasada a pasada y en error de repetitividad). Se consideran datos válidos los 50 m centrales, con objeto de descartar los datos iniciales de cada pasada en los que el AGVS puede que todavía no esté estabilizado. Cuando el punto central no pueda ser obtenido de manera exacta podrá ser obtenido de forma aproximada:
– En recta, tomando 25 m a cada lado del punto central de la recta de la pasada de vuelta.
– En curva, tomando 25 m de arco a cada lado del punto central de la semicircunferencia correspondiente a la pasada de vuelta.
Se dará al Sistema de autoguiado (AGS) al menos 10 segundos antes de comenzar la conducción de cada pasada, permitiéndole adquirir las condiciones estables de funcionamiento.
1.3.3 Secuencia de ensayo parcial.
1.4 Determinación del error: XTE.
XTEi = Longitud de la línea recta perpendicular desde RVP2i hasta el segmento de la polilínea formado por los RVP1i.
Donde:
XTEi = error en un punto i.
RVP2i = punto representativo del vehículo en la vuelta, en el pto i.
RVP1i = punto representativo del vehículo en la ida, en el pto i.
El XTEi será un error de pasada a pasada o de repetitividad dependiendo del tiempo transcurrido entre RVP2i y RVP1i.
1.5 Obtención de los errores de clase 95 % para cada repetición.
Conocidos los múltiples valores de error de pasada a pasada y error de repetitividad, se representan dos gráficos respectivamente. Cada uno de ellos presentará una distribución de los valores absolutos de cada error, así como también la función del error acumulado. Sobre el eje de abscisas se representará el valor de los errores menos dos veces la incertidumbre expandida de medida del sistema de referencia: XTEi-2U, ordenados y agrupados según intervalos de longitud establecidos. En caso de que el valor de XTEi sea menor que 2U se tomará 0 como resultado de la resta XTEi-2U. Sobre el eje de ordenadas irá el porcentaje que dicho error acumulado supone con respecto al total de errores.
El error de clase 95 %, considerado el indicador clave de calidad según la norma ISO de referencia, se obtendrá donde la función del error acumulado alcance un porcentaje de 95. El valor del eje de abscisas correspondiente a dicho porcentaje será el error que use para la evaluación del sistema. En el caso de que el 95 % no coincida con un número entero del eje de abscisas se tomará el inmediato superior.
Para cada ensayo parcial se tendrán los siguientes errores de clase 95 %:
– EP95ri: Error de clase 95 % para cada una de las repeticiones (i) de pasada a pasada en recta.
– EP95ci: Error de clase 95 % para cada una de las repeticiones (i) de pasada a pasada en curva.
– ER95ri: Error de clase 95 % para cada una de las repeticiones (i) de repetitividad en recta.
– ER95ci: Error de clase 95 % para cada una de las repeticiones (i) de repetitividad en curva.
2. Evaluación de los sistemas de autoguiado (AGS) asociados a máquinas y tractores
2.1 Cálculo de los parámetros evaluables.
EP95 es el error de pasada a pasada clase 95 % y ER95 es el error de repetitividad clase 95 %. Ambos referidos al ensayo completo. Se calculan aplicando las siguientes medias ponderadas.


La ponderación contenida en estas fórmulas se justifica con el número de repeticiones del ensayo completo. Son 9 las correspondientes a las rectas (3 repeticiones por tres velocidades) y 6 las correspondientes a las curvas (3 repeticiones por 2 velocidades).
2.2 Evaluación de sistemas centimétricos.
| Parámetros evaluables | Valor | Calificación |
|---|---|---|
| Error de pasada a pasada clase 95 %. | 0 ≤ EP95 ≤ 1 cm | Excelente (++) |
| 1 < EP95 < 2,5 cm | Muy buena (+) | |
| 2,5 ≤ EP95 ≤ 5,5 cm | Buena (o) | |
| Error de repetitividad clase 95 %. | 0 ≤ ER95 ≤ 2,5 cm | Excelente (++) |
| 2,5< ER95 < 5,5 cm | Muy buena (+) | |
| 5,5 ≤ ER95 ≤ 7,5 cm | Buena (o) |
2.3 Evaluación de sistemas submétricos.
| Parámetros evaluables | Valor | Calificación |
|---|---|---|
| Error de pasada a pasada clase 95 %. | 0 ≤ EP95 ≤ 10 cm | Excelente (++) |
| 10 < EP95 <20 cm | Muy buena (+) | |
| 20 ≤ EP95 ≤ 40 cm | Buena (o) | |
| Error de repetitividad clase 95 %. | 0 ≤ ER95 ≤ 15 cm | Excelente (++) |
| 15 < ER95 < 30 cm | Muy buena (+) | |
| 30 ≤ ER95 ≤ 50 cm | Buena (o) |
2.4 Criterios para la obtención de las marcas de calidad.
Para la obtención de la marca de calidad por parte de un sistema de autoguiado (AGS) asociado a máquinas y tractores se deberá obtener una calificación Buena (o), Muy buena (+) ó Excelente (++) en ambos parámetros evaluables: error de pasada a pasada y error de repetitividad. No siendo necesario que las calificaciones de ambos parámetros sean coincidentes.
3. Consideraciones de la marca de calidad en función de la casuística de los AGVS
3.1 Provisión de los tractores y máquinas a ensayo.
3.1.1 AGS universal con actuador eléctrico sobre el volante.
Será el fabricante del sistema de autoguiado el que lo presente a ensayo junto con un tractor o máquina estándar. Se considera un tractor estándar aquel con categoría T1, de aproximadamente 120 CV de potencia y doble tracción. La elección y provisión de la máquina o el tractor será por parte de dicho fabricante, así como los costes que pudiesen derivarse de este hecho.
3.1.2 AGS con actuador hidráulico en la dirección.
a. Instalación completa realizada directamente en fábrica. El fabricante del AGVS (tractor o máquina más sistema de autoguiado) será el que lo presente a ensayo.
b. Preinstalación realizada en fábrica (plug and play). El fabricante del sistema de autoguiado será el que lo presente a ensayo junto con la máquina o el tractor de la preinstalación. La provisión de la máquina o del tractor será por parte de dicho fabricante, así como los costes que pudiesen derivarse de este hecho.
c. Instalación completa no montada en fábrica y realizada por el fabricante de la máquina o del tractor o por un fabricante ajeno a éste. El fabricante del sistema de autoguiado será el que lo presente a ensayo junto con la máquina o el tractor con la instalación montada. La provisión de la máquina o del tractor será por parte de dicho fabricante, así como los costes que pudiesen derivarse de este hecho.
3.1.3 Ajustes previos.
Una vez instalados los equipos, será necesario que personal técnico del fabricante verifique la instalación y realice el ajuste y calibración correspondiente para conseguir la mayor precisión posible de cara a una realización efectiva del ensayo.
3.2 Tractores o máquinas acogidos en cada marca de calidad.
La máquina o el tractor, identificado por tipo, denominación comercial, variante y versión, utilizado para el ensayo estará directamente asociado a la marca de calidad del AGS. Para máquinas sin homologación de tipo, se caracterizarán por lo indicado en la declaración de conformidad CE. Dicha marca de calidad podrá ser extendida a otros tractores siempre y cuando quede acreditada y documentada su viabilidad por parte del fabricante, es decir que comparten con el ensayado las mismas características y componentes que pudieran afectar a los resultados del ensayo. La viabilidad deberá ser estudiada y aceptada por el laboratorio de ensayo. Del mismo modo, se hará para las máquinas.
4. Identificación de los Sistemas evaluados
Con el resultado de cada ensayo completo se emitirá un informe por parte del laboratorio de ensayo. En éste se incluirán además los parámetros de caracterización del ensayo y de la muestra ensayada. Se publicarán los informes de los AGS que hayan obtenido marca de calidad con calificación excelente, muy buena o buena.
Agència Estatal Butlletí Oficial de l'Estat
Avda. de Manoteras, 54 - 28050 Madrid




