Agencia Estatal Boletín Oficial del Estado






Solo los textos originales de la CEPE/ONU surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben verificarse en la última versión del documento de situación de la CEPE/ONU TRANS/WP.29/343, disponible en: http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Fecha de entrada en vigor: 10 de junio de 2021
El presente documento tiene valor meramente informativo. El texto auténtico y jurídicamente vinculante es el siguiente: ECE/TRANS/WP.29/2020/122.
ÍNDICE
REGLAMENTO
|
0. |
Introducción |
|
1. |
Ámbito de aplicación |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Especificaciones |
|
6. |
Procedimiento de ensayo |
|
7. |
Modificación del tipo de vehículo y extensión de la homologación de tipo |
|
8. |
Conformidad de la producción |
|
9. |
Sanciones por falta de conformidad de la producción |
|
10. |
Cese definitivo de la producción |
|
11. |
Nombre y dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
ANEXOS
|
1. |
Comunicación |
|
2. |
Disposición de las marcas de homologación |
|
3. |
Método de ensayo para determinar el límite del ángulo muerto |
0. INTRODUCCIÓN (para información)
|
0.1. |
Las maniobras de inicio de la marcha a baja velocidad desde una posición de parada que implican colisiones entre vehículos de las categorías M2, M3, N2 y N3 (vehículos sometidos a ensayo) y peatones y ciclistas tienen graves consecuencias para estos usuarios vulnerables de la carretera. En el pasado, la seguridad de los usuarios vulnerables de la carretera se incrementó al aumentar el número de espejos retrovisores a fin de obtener una mayor visibilidad de la zona situada delante del vehículo. Dado que siguen produciéndose colisiones de estas características y que se han introducido sistemas avanzados de asistencia al conductor en muchos segmentos de vehículos, se impone la utilización de estos sistemas de ayuda para evitar accidentes entre los vehículos en cuestión y los usuarios vulnerables de la carretera. |
|
0.2. |
Las consideraciones teóricas ponen de relieve que las situaciones de tráfico que implican a vehículos de los tipos mencionados y a usuarios vulnerables de la carretera pueden revestir una gravedad importante porque los operadores de los vehículos no perciben adecuadamente la situación. En algunos casos, la situación puede agravarse de forma tan repentina que los avisos de extrema urgencia destinados a que el conductor reaccione no pueden activarse con tiempo suficiente para que se produzca dicha reacción. En general, solo es previsible que un conductor reaccione a cualquier información (señal de urgencia extrema o relativa) pasado un tiempo de reacción. En muchas ocasiones, en particular en las maniobras de proximidad, este tiempo de reacción es mucho más largo que el tiempo necesario para impedir el accidente, que no puede evitarse a pesar de la advertencia. |
|
0.3. |
Las advertencias de extrema urgencia durante una situación de conducción solo están justificadas si existe una probabilidad alta de accidente; en caso contrario, los conductores de los vehículos tienden a ignorar las alertas del sistema. Sin embargo, si las advertencias de urgencia relativa se activaran con la suficiente antelación, podrían contribuir a ayudar al conductor, en lugar de a molestarle. Teóricamente es posible diseñar una interfaz persona-máquina para los sistemas de ayuda al conductor al inicio de la marcha que no moleste a los conductores cuando la información no sea necesaria, por ejemplo, mediante el uso de un modo de señal menos invasivo. |
|
0.4. |
Por lo tanto, el presente Reglamento requiere la activación de una señal de aviso de proximidad en caso de que peatones o ciclistas entren en la zona crítica del ángulo muerto delante del vehículo cuando el vehículo objeto de ensayo se esté preparando para iniciar la marcha en línea recta o esté avanzando de frente a baja velocidad. Esta señal se desactivará automáticamente en caso de fallo del sistema o ensuciamiento de los sensores, mientras que será posible desactivarla manualmente mediante una secuencia de acciones del conductor a fin de evitar su desactivación accidental. |
|
0.5. |
Asimismo, el presente Reglamento requiere una señal adicional, que se producirá si la colisión es inminente, por ejemplo, cuando el vehículo acelere desde una posición de parada y el peatón o el ciclista se encuentre delante del vehículo. El fabricante podrá determinar la estrategia de activación o desactivación de la señal de advertencia de colisión; no obstante, en caso de fallo del sistema o de ensuciamiento de los sensores, la señal de aviso de proximidad y la señal de advertencia de colisión se desactivarán a la vez. |
|
0.6. |
En el presente Reglamento se define un procedimiento de ensayo basado en vehículos objeto de ensayo que están estacionados, inician la marcha y se mueven hacia adelante en línea recta a baja velocidad para velocidades iguales o inferiores a 10 km/h. Los datos de los análisis de colisión muestran la pertinencia de facilitar avisos y advertencias durante estas maniobras del vehículo, ya que la señal de aviso debe producirse con antelación suficiente para alertar al conductor de que hay peatones o ciclistas muy próximos a la parte delantera del vehículo. |
|
0.7. |
El presente Reglamento no puede incluir en el proceso de homologación de tipo todas las condiciones del tráfico y todas las características de la infraestructura; el presente Reglamento reconoce que las prestaciones que exige no pueden conseguirse en todas las condiciones (las prestaciones del sistema pueden verse afectadas por las condiciones del vehículo, el entorno vial, las condiciones meteorológicas, las situaciones del tráfico, etc.). Las condiciones y características del mundo real no deben dar lugar a avisos erróneos hasta el punto de que inciten al conductor a desactivar el sistema. |
1. ÁMBITO DE APLICACIÓN
|
1.1. |
El presente Reglamento se aplica a la homologación de vehículos de las categorías M2, M3, N2 y N3 por lo que respecta a un sistema a bordo para detectar e informar al conductor de la presencia de peatones y ciclistas muy próximos al ángulo muerto de la parte delantera del vehículo y, si se considera necesario en función de la estrategia del fabricante, alertar al conductor sobre una posible colisión. |
|
1.2. |
Los requisitos del presente Reglamento están redactados para su aplicación a los vehículos que circulan por el carril derecho. En los vehículos desarrollados para la circulación por el carril izquierdo, estos requisitos se aplicarán invirtiendo los criterios, según corresponda. |
|
1.3. |
Los siguientes vehículos de las categorías M y N quedarán fuera del ámbito de aplicación del presente Reglamento:
los vehículos en los cuales la instalación de cualquier dispositivo de información al inicio de la marcha sea incompatible con su uso en la carretera podrán quedar total o parcialmente exentos del presente Reglamento, sujetos a la decisión de la autoridad de homologación de tipo. |
2. DEFINICIONES
A efectos del presente Reglamento, se entenderá por:
|
2.1. |
«Sistema de información al inicio de la marcha»: un sistema para detectar e informar al conductor de la presencia de peatones y ciclistas muy próximos al ángulo muerto de la parte delantera del vehículo y, si fuera necesario en función de la estrategia del fabricante, alertar al conductor de una posible colisión. |
|
2.2. |
«Homologación de un tipo de vehículo»: el procedimiento completo mediante el cual una Parte contratante del Acuerdo certifica que un tipo de vehículo cumple los requisitos técnicos del presente Reglamento. |
|
2.3. |
«Tipo de vehículo con respecto a su sistema de información al inicio de la marcha»: una categoría de vehículos que no difieren en aspectos esenciales como: a) el nombre comercial o la marca del fabricante; b) las características del vehículo que influyen significativamente en el rendimiento del sistema de información al inicio de la marcha; c) el tipo y el diseño de dicho sistema. |
|
2.4. |
«Vehículo objeto de ensayo»: el vehículo que está siendo sometido a los ensayos. |
|
2.5. |
«Usuario vulnerable de la carretera»: un peatón, ya sea niño o adulto, o un ciclista, niño o adulto. |
|
2.6. |
«Señal de aviso»: una señal emitida por el sistema de información al inicio de la marcha con el fin de informar al conductor del vehículo de que hay usuarios vulnerables de la carretera muy próximos a la parte delantera del vehículo. |
|
2.7. |
«Señal de advertencia de colisión»: una señal emitida por un sistema de información al inicio de la marcha con el fin de alertar al conductor del vehículo cuando dicho sistema ha detectado una posible colisión frontal con un usuario vulnerable de la carretera que se encuentra muy cerca de la parte delantera del vehículo. |
|
2.8. |
«Interruptor principal de control del vehículo»: dispositivo mediante el cual el equipo electrónico de a bordo pasa de estar desconectado, como ocurre cuando el vehículo está estacionado sin su conductor, al modo normal de funcionamiento. |
|
2.9. |
«Inicialización»: proceso de puesta en funcionamiento del sistema de información al inicio de la marcha desde que el interruptor principal de control del vehículo se activa hasta que es plenamente funcional. |
|
2.10. |
«Espacio común»: una zona en la que pueden visualizarse dos o más funciones informativas (por ejemplo, símbolos), pero no de manera simultánea. |
|
2.11. |
«Punto de referencia ocular»: el punto medio entre dos puntos situados a 65 mm de distancia y a 635 mm por encima (verticalmente) del punto de referencia que se especifica en el anexo 1 del documento ECE/TRANS/WP.29/78/Rev.6 (1) a partir del asiento del conductor. La recta que une estos dos puntos debe ser perpendicular al plano vertical longitudinal medio del vehículo. El centro del segmento que une los dos puntos está situado en un plano vertical longitudinal que debe pasar por el centro de la posición de asiento del conductor que indique el fabricante del vehículo. |
|
2.12. |
«Parte frontal del vehículo»: el plano perpendicular al plano longitudinal medio del vehículo y que toca el punto más adelantado de este, sin tener en cuenta los dispositivos salientes de visión indirecta o cualquier parte del vehículo situada a más de 2,0 m del suelo. |
|
2.13. |
«Lado del copiloto»: lado derecho del vehículo en el caso de circulación por la derecha. |
|
2.14. |
«Plano del vehículo del lado del copiloto»: el plano paralelo al plano longitudinal medio del vehículo en contacto con el punto más externo de este en la dirección del lado del copiloto por delante del punto de referencia ocular del conductor, sin tener en cuenta los dispositivos salientes de visión indirecta o cualquier otra parte del vehículo objeto de ensayo situada a más de 2,0 m del suelo. |
|
2.15. |
«Lado del conductor»: el lado izquierdo del vehículo en el caso de circulación por la derecha. |
|
2.16. |
«Plano del vehículo del lado del conductor»: el plano paralelo al plano longitudinal medio del vehículo en contacto con el punto más externo de este en la dirección del lado del conductor por delante del punto de referencia ocular del conductor, sin tener en cuenta los dispositivos salientes de visión indirecta o cualquier otra parte del vehículo objeto de ensayo situada a más de 2,0 m del suelo. |
|
2.17. |
«Anchura del vehículo»: la distancia entre los planos del lado del copiloto y del lado del conductor. |
|
2.18. |
«Trayectoria del vehículo»: la conexión de todas las posiciones dentro de la anchura del vehículo en las que la parte frontal del vehículo ha estado o estará durante el ensayo. |
|
2.19. |
«Objetivo blando»: un objetivo que, en caso de colisión, sufrirá un daño mínimo y causará un daño mínimo al vehículo objeto de ensayo. |
|
2.20. |
«Objetivo de ensayo en forma de peatón»: un peatón del tamaño de un adulto o un niño simulado mediante un dispositivo de objetivo blando especificado con arreglo a la norma ISO 19206-2:2018. |
|
2.21. |
«Objetivo de ensayo en forma de ciclista»: un ciclista del tamaño de un adulto y una bicicleta simulados mediante un dispositivo de objetivo blando y una bicicleta especificados conforme a la norma ISO (CD) 19206-4. |
|
2.22. |
«Límite del ángulo muerto»: la línea, descrita conforme a la definición del anexo 3, que une todos los puntos situados en los límites de las zonas visibles por delante de la parte frontal del vehículo y muy próximos al vehículo objeto de ensayo. |
|
2.23. |
«Punto de colisión»: la posición en la que la trayectoria de cualquier punto de la parte frontal del vehículo se cruza con cualquier punto de referencia de un objetivo blando de usuario vulnerable de la carretera en caso de que el vehículo realice una maniobra de inicio de la marcha o realice una maniobra a baja velocidad. |
|
2.24. |
«Distancia de separación hacia adelante»: la distancia en la dirección de avance entre la parte frontal del vehículo y el punto más cercano del objetivo blando. |
|
2.25. |
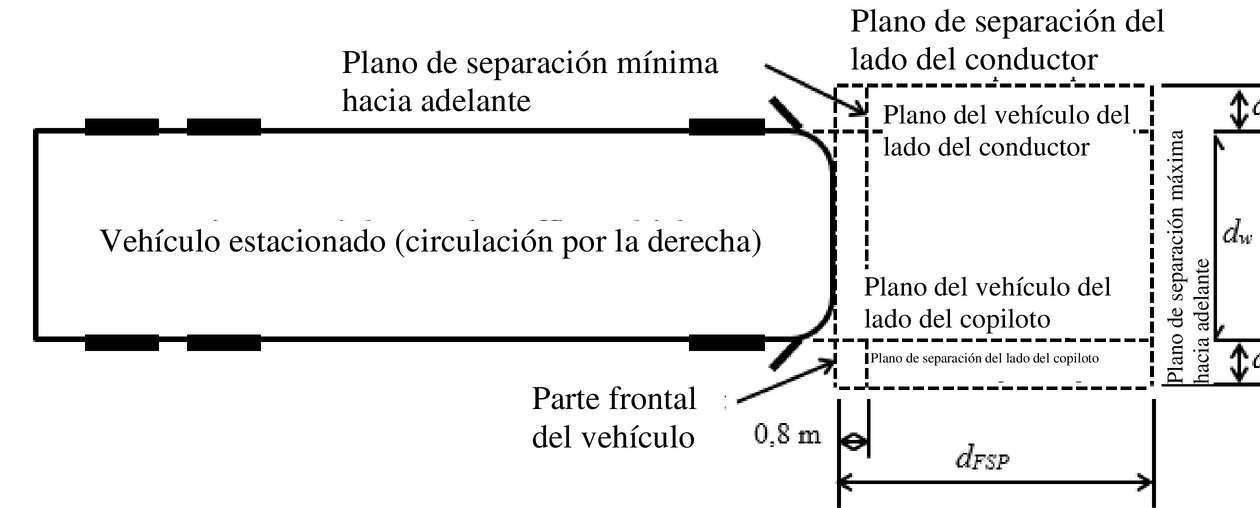
«Plano de separación máxima hacia adelante»: el plano perpendicular al plano longitudinal del vehículo que representa la mayor distancia de separación hacia adelante que el sistema de información al inicio de la marcha requiere para detectar la presencia de un usuario vulnerable de la carretera. La distancia de este plano desde la parte frontal del vehículo se fijará en 3,7 m o en el punto más avanzado del límite del ángulo muerto, a elección del fabricante, y no será inferior a 1,0 m. |
|
2.26. |
«Plano de separación mínima hacia adelante»: el plano perpendicular al plano longitudinal del vehículo que representa la menor distancia de separación hacia adelante que el sistema de información al inicio de la marcha requiere para detectar la presencia de un usuario vulnerable de la carretera. La distancia de este plano desde la parte frontal del vehículo será de 0,8 m. |
|
2.27. |
«Plano de separación del lado del copiloto»: el plano paralelo al plano longitudinal del vehículo y situado a 0,5 m del plano del vehículo del lado del copiloto hacia el exterior. |
|
2.28. |
«Plano de separación del lado del conductor»: el plano paralelo al plano longitudinal del vehículo y situado a 0,5 m del plano del vehículo del lado del conductor hacia el exterior. |
|
2.29. |
«Modo de marcha hacia adelante»: modo del vehículo en el que el tren de potencia mueve el vehículo hacia adelante, al liberarse el sistema de frenos o presionarse el pedal del acelerador (o activarse un control equivalente). |
|
2.30. |
«Maniobra potencial de inicio de la marcha»: estado en el que se encuentra un vehículo objeto de ensayo estacionado, con el interruptor principal de control del vehículo activado, el vehículo en modo de funcionamiento normal y en modo de marcha hacia adelante o con una marcha hacia adelante engranada o seleccionada. |
|
2.31. |
«Maniobra de baja velocidad»: desplazamiento del vehículo objeto de ensayo en modo de funcionamiento normal hacia adelante en línea recta a velocidades inferiores a 10 km/h. |
|
2.32. |
«Último punto de información (UPI)»: el punto en el que deberá haberse emitido la señal de aviso. |
3. SOLICITUD DE HOMOLOGACIÓN
|
3.1. |
El fabricante del vehículo o su representante debidamente autorizado deberán presentar la solicitud de homologación de un tipo de vehículo por lo que respecta al sistema de información al inicio de la marcha. |
|
3.2. |
Esta solicitud deberá ir acompañada de los documentos que se mencionan a continuación, por triplicado, e incluir la información siguiente: |
|
3.2.1. |
Una descripción del tipo de vehículo con respecto a los elementos mencionados en el apartado 5, acompañada de dibujos acotados y de la documentación indicada en el punto 6.1. Deberán precisarse los números o símbolos identificativos del tipo de vehículo. |
|
3.3. |
Se presentará al servicio técnico encargado de la realización de los ensayos de homologación un vehículo representativo del tipo cuya homologación se solicite. |
4. HOMOLOGACIÓN
|
4.1. |
Si el tipo de vehículo presentado a homologación con arreglo al presente Reglamento cumple los requisitos del apartado 5, deberá concederse su homologación. |
|
4.2. |
Deberá verificarse la conformidad de los requisitos establecidos en el apartado 5 con el procedimiento de ensayo definido en el apartado 6, pero su funcionamiento no se limitará a estas condiciones específicas de ensayo. |
|
4.3. |
Se asignará un número de homologación a cada tipo de vehículo homologado; los dos primeros dígitos (00 cuando se refieran al presente Reglamento en su versión inicial) indicarán la serie de enmiendas que incluya los últimos cambios importantes de carácter técnico que se hayan introducido en el presente Reglamento en el momento de expedirse la homologación. La misma Parte contratante no podrá asignar el mismo número al mismo tipo de vehículo equipado con otro tipo de sistema de información al inicio de la marcha, ni a otro tipo de vehículo. |
|
4.4. |
La concesión, la denegación o la retirada de la homologación con arreglo al presente Reglamento se notificará a las Partes del Acuerdo que apliquen el presente Reglamento por medio de un formulario que deberá ajustarse al modelo del anexo 1, y de fotografías o planos facilitados por el solicitante, los cuales deberán estar en un formato que no sea superior al tamaño A4 (210 × 297 mm), o bien estarán plegados en dicho formato, y a una escala adecuada. |
|
4.5. |
Todo vehículo conforme con un tipo de vehículo homologado con arreglo al presente Reglamento deberá llevar, de manera claramente visible y en un lugar de fácil acceso especificado en el formulario de homologación, una marca de homologación internacional conforme con el modelo descrito en el anexo 2 que consista en lo siguiente: |
|
4.5.1. |
un círculo que rodee la letra «E» seguido de:
a) el número distintivo del país que haya concedido la homologación (2); así como b) el número del presente Reglamento, seguido de la letra «R», un guion y el número de homologación a la derecha del círculo establecido en el presente apartado; o |
|
4.5.2. |
un óvalo que rodee las letras «UI» seguido de un identificador único. |
|
4.6. |
Si el vehículo se ajusta un tipo de vehículo homologado con arreglo a otros Reglamentos de las Naciones Unidas adjuntos al Acuerdo, en el país que haya concedido la homologación con arreglo al presente Reglamento, no será necesario repetir el símbolo prescrito en el apartado 4.5; en ese caso, los números del Reglamento de las Naciones Unidas y de la homologación, así como cualquier símbolo adicional, se consignarán en columnas verticales a la derecha del símbolo establecido en el apartado 4.5. |
|
4.7. |
La marca de homologación será claramente legible e indeleble. |
|
4.8. |
La marca de homologación se situará en la placa de características del vehículo o cerca de ella. |
5. ESPECIFICACIONES
|
5.1. |
Requisitos generales |
|
5.1.1. |
Todo vehículo equipado con un sistema de información al inicio de la marcha que se ajuste a la definición del apartado 2.1 deberá cumplir los requisitos de los apartados 5.2 a 5.8 del presente Reglamento. |
|
5.1.2. |
La eficacia del sistema de información al inicio de la marcha no deberá verse afectada por campos magnéticos o eléctricos. Ello se demostrará mediante el cumplimiento de los requisitos técnicos y las disposiciones transitorias del Reglamento n.o 10 de las Naciones Unidas, serie 05 de enmiendas, o de cualquier otra serie posterior de enmiendas. |
|
5.2. |
Requisitos de rendimiento |
|
5.2.1. |
El sistema de información al inicio de la marcha deberá funcionar como mínimo durante todas las maniobras potenciales de inicio de la marcha y las maniobras de baja velocidad, en condiciones ambientales de luz por encima de 15 lux, con o sin las luces de cruce encendidas. |
|
5.2.2. |
El sistema de información al inicio de la marcha informará al conductor de la presencia de usuarios vulnerables de la carretera muy próximos a la parte frontal del vehículo que puedan estar en peligro durante una potencial maniobra de inicio de la marcha o una maniobra de baja velocidad. Esta información se facilitará al conductor de manera que este pueda impedir que el vehículo entre en la trayectoria del usuario vulnerable de la carretera. |
|
5.2.2.1. |
Se mantendrá la señal de aviso como mínimo mientras se cumplan las condiciones especificadas en los puntos 5.2.2.2 y 5.2.2.3. |
|
5.2.2.2. |
Maniobra potencial de inicio de la marcha |
|
5.2.2.2.1. |
Cuando se realice una maniobra potencial de inicio de la marcha, el sistema de información emitirá una señal de aviso en el caso de que usuarios vulnerables de la carretera se desplacen a velocidades de entre 3 y 5 km/h desde el lado del copiloto o el lado del conductor, en una dirección perpendicular al plano longitudinal medio del vehículo y dentro de una zona limitada por los planos de separación máxima y mínima hacia adelante y los planos de separación del lado del conductor y del lado del copiloto. |
|
5.2.2.3. |
Maniobra de baja velocidad |
|
5.2.2.3.1. |
Cuando se realice una maniobra a baja velocidad, el sistema de información emitirá una señal de aviso en caso de que un ciclista, adulto o niño, esté parado o se desplace hacia adelante en una dirección paralela al plano longitudinal medio del vehículo a una velocidad de entre 0 y 10 km/h y esté situado dentro de una zona limitada por los planos del vehículo del lado del copiloto y del lado del conductor y los planos de separación máxima y mínima hacia adelante. |
|
5.2.2.3.2. |
Cuando un vehículo que realiza una maniobra a baja velocidad haya detectado un ciclista adulto o niño y emita una señal de aviso con arreglo al punto 5.2.2.3.1, el sistema de información al inicio de la marcha mantendrá la señal de aviso aunque el vehículo se haya detenido. La señal de aviso se mantendrá mientras el ciclista permanezca en la zona limitada por los planos del vehículo del lado del copiloto y del lado del conductor y los planos de separación máxima y mínima hacia adelante. |
|
5.2.2.3.3. |
Cuando se realice una maniobra de giro, la estrategia de detección del sistema de información al inicio de la marcha podrá ajustarse. No se requiere ajustar los sensores al ángulo de giro. La estrategia de ajuste de la detección se explicará en la información mencionada en el punto 6.1. El servicio técnico verificará el funcionamiento del sistema de acuerdo con la estrategia. |
|
5.2.2.4. |
La señal de aviso cumplirá los requisitos establecidos en el punto 5.6. |
|
5.2.3. |
El fabricante deberá demostrar, a satisfacción del servicio técnico y de la autoridad de homologación de tipo, mediante documentación, simulación o por otros medios, que el sistema de información al inicio de la marcha funciona según lo especificado para ciclistas y bicicletas de menor tamaño, similares al tamaño de un niño en bicicleta. |
|
5.2.4. |
El fabricante deberá demostrar, a satisfacción del servicio técnico y de la autoridad de homologación de tipo, mediante documentación, simulación o por otros medios, que se minimiza el número de reacciones falsas debidas a la detección de usuarios vulnerables de la carretera y objetos estáticos (como conos, señales de tráfico, setos y coches aparcados) situados fuera de los límites definidos en los puntos 5.2.2.2 y 5.2.2.3 para las maniobras pertinentes. |
|
5.3. |
Desactivación automática |
|
5.3.1. |
El sistema de información al inicio de la marcha se desactivará automáticamente en caso de fallo o si no puede funcionar correctamente por haberse ensuciado sus sensores con hielo, nieve, barro, suciedad o materiales similares. El sistema podrá también desactivarse automáticamente si las condiciones ambientales de luz se encuentran por debajo de las especificadas en el punto 5.2.1. |
|
5.3.2. |
La desactivación automática se indicará mediante la señal de advertencia de fallo especificada en el punto 5.8. |
|
5.3.3. |
El sistema se reactivará automáticamente cuando se haya verificado el funcionamiento normal de los sensores. Esto se someterá a ensayo con arreglo a lo dispuesto en los puntos 6.8 (ensayo de detección de fallos) y 6.9 (ensayo de desactivación automática). |
|
5.4. |
Desactivación manual |
|
5.4.1. |
Deberá ser posible desactivar manualmente el sistema de información al inicio de la marcha. |
|
5.4.2. |
La desactivación manual se realizará mediante una secuencia de acciones deliberadas por parte del conductor, por ejemplo, mediante una única intervención que supere un determinado umbral de tiempo o mediante una doble presión, o por medio de dos intervenciones separadas pero simultáneas. |
|
5.4.3. |
No será posible desactivar manualmente ningún otro sistema al mismo tiempo que el sistema de información al inicio de la marcha o mediante la misma secuencia de acciones. |
|
5.4.4. |
Cuando se desactive manualmente, el conductor deberá poder volver a activarlo manualmente con facilidad. |
|
5.4.5. |
Cuando se desactive manualmente, el sistema se reactivará automáticamente al activarse el interruptor principal de control del vehículo. |
|
5.5. |
Inicialización del sistema |
|
5.5.1. |
Si el sistema de información al inicio de la marcha no se ha calibrado después de un tiempo de conducción acumulado de quince segundos por encima de una velocidad de 0 km/h (incluidas las fases estacionarias), el conductor deberá recibir información al respecto. Esta información deberá persistir hasta que el sistema haya sido calibrado con éxito. |
|
5.6. |
Señal de aviso |
|
5.6.1. |
La señal de aviso del sistema de información al inicio de la marcha a la que refiere el punto 5.2.2 será una señal de aviso óptica que el conductor detecte y pueda verificar fácilmente desde su asiento. |
|
5.6.2. |
Esta señal de aviso será visible con luz diurna y de noche. |
|
5.7. |
Señal de advertencia de colisión |
|
5.7.1. |
El sistema de información al inicio de la marcha avisará al conductor cuando el riesgo de colisión sea inminente mediante una señal de advertencia de colisión. |
|
5.7.2. |
La señal de advertencia de colisión se proporcionará mediante una combinación de, al menos, dos modos seleccionados de una señal óptica, acústica o táctil.
Cuando la señal de advertencia de colisión sea una señal óptica, esta deberá diferir en su estrategia de activación con respecto a la señal de aviso especificada en los puntos 5.2.2 y 5.6. |
|
5.7.3. |
El conductor deberá comprender fácilmente que la señal de advertencia alerta de una posible colisión. En caso de que la señal de advertencia sea óptica, también deberá ser visible a luz del día y de noche. |
|
5.7.4. |
La señal de advertencia de colisión se activará según la estrategia del fabricante. La estrategia de advertencia se explicará en la información mencionada en el punto 6.1.
El servicio técnico verificará el funcionamiento del sistema de acuerdo con la estrategia. |
|
5.7.5. |
La señal de advertencia de colisión podrá desactivarse manualmente. En caso de desactivación manual, la señal se reactivará con cada activación del interruptor principal de control del vehículo. |
|
5.8. |
Señales de advertencia de fallo |
|
5.8.1. |
La señal de advertencia de fallo contemplada en el apartado 5.3.2 será una señal óptica distinta de la señal de aviso y claramente diferenciable de esta. La señal de advertencia de fallo deberá ser visible a la luz del día y de noche y fácilmente verificable por el conductor desde su asiento. |
|
5.8.2. |
La señal de advertencia de fallo permanecerá activa mientras el sistema de información siga sin estar disponible. |
|
5.8.3. |
Las señales de advertencia de fallo del sistema de información al inicio de la marcha deberán activarse con la activación del interruptor principal de control del vehículo. Este requisito no se aplica a las señales de advertencia de colisión que se muestren en un espacio común a la señal de advertencia de fallo. |
|
5.9. |
Disposiciones para la inspección técnica periódica |
|
5.9.1. |
Se podrá confirmar el estado de funcionamiento correcto del sistema de información al inicio de la marcha mediante una observación visual del estado de la señal de advertencia de fallo en una inspección técnica periódica.
Cuando la señal de advertencia de fallo se encuentre en un espacio común, deberá comprobarse que este funciona antes de verificar el estado de la señal de advertencia de fallo. |
6. PROCEDIMIENTO DE ENSAYO
|
6.1. |
El fabricante deberá aportar una documentación que exponga el diseño básico del sistema y, en su caso, los medios por los que se conecta con otros sistemas del vehículo. Deberá explicarse el funcionamiento del sistema, en particular su estrategia de sensores y advertencias, y la documentación deberá describir la manera de comprobar el estado de funcionamiento del sistema e indicar si este influye en otros sistemas del vehículo, así como describir los métodos empleados para determinar las situaciones que harán aparecer la señal de advertencia de fallo. La documentación recogerá información suficiente para que la autoridad de homologación de tipo pueda identificar el tipo de vehículo y para ayudar a la toma de decisiones sobre la selección de las condiciones más desfavorables. |
|
6.2. |
Condiciones de ensayo |
|
6.2.1. |
El ensayo se llevará a cabo en una superficie plana y seca, de asfalto u hormigón. |
|
6.2.2. |
La temperatura ambiente estará comprendida entre 0 °C y 45 °C. |
|
6.2.3. |
El ensayo se realizará en condiciones de visibilidad que permitan que el objetivo sea visible mientras dure el ensayo y que posibiliten una conducción segura a las velocidades de ensayo requeridas. |
|
6.2.4. |
La iluminación ambiental natural será homogénea en la zona de ensayo y superior a 1 000 lux. Conviene asegurarse de que los ensayos no se realicen conduciendo con el sol en posición baja por delante o por detrás. |
|
6.3. |
Condiciones del vehículo |
|
6.3.1. |
Peso de ensayo
El vehículo se someterá a ensayo en una condición de carga que acuerden el fabricante y el servicio técnico, con la distribución de la masa entre los ejes declarada por el fabricante. Una vez iniciado el procedimiento de ensayo, no se introducirán cambios. El fabricante deberá demostrar documentalmente que el sistema funciona en cualquier condición de carga. |
|
6.3.2. |
En caso de que el sistema de información al inicio de la marcha esté equipado con un temporizador que pueda regular el usuario, se realizará el ensayo especificado en los apartados 6.5, 6.6 y 6.7 para cada caso de ensayo con el umbral de información fijado en los ajustes que genere la señal de aviso más cercana al punto de colisión, es decir, en el caso más desfavorable. Una vez iniciado el procedimiento de ensayo, no se introducirán cambios. |
|
6.3.3. |
Acondicionamiento previo al ensayo |
|
6.3.3.1. |
A petición del fabricante, el vehículo objeto de ensayo podrá conducirse un máximo de 100 km en una combinación de carreteras urbanas y rurales con otros componentes del tráfico y con mobiliario viario a fin de inicializar el sistema de sensores. |
|
6.4. |
Ensayo de verificación de las señales |
|
6.4.1. |
Con el vehículo parado, comprobar que las señales ópticas de advertencia de fallo cumplen los requisitos del apartado 5.6. |
|
6.5. |
Ensayos de cruce estáticos |
|
6.5.1. |
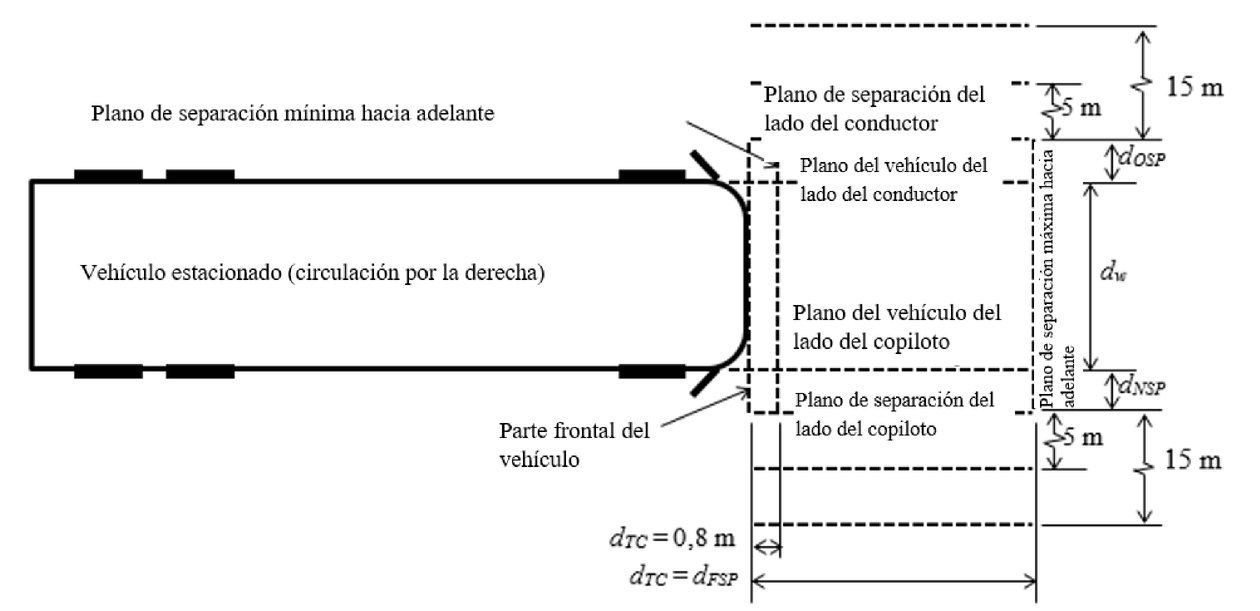
El vehículo objeto de ensayo permanecerá en una potencial maniobra de inicio de la marcha con el sistema de información al inicio de la marcha activo y la zona de ensayo marcada como se muestra en el gráfico 1 del apéndice 1. El correspondiente objetivo de ensayo (T) deberá maniobrarse de manera que se mueva en una trayectoria perpendicular al plano longitudinal medio del vehículo objeto de ensayo a la distancia del caso de ensayo (dTC ) de la parte frontal del vehículo y de la correspondiente dirección de cruce (c) (cuadro 1 del apéndice 1). El punto de referencia del objetivo de ensayo en forma de peatón será el punto H (definido en la norma ISO 19206-2:2018) más cercano al vehículo objeto de ensayo. El punto de referencia del objetivo de ensayo en forma de ciclista se situará en la intersección entre un plano perpendicular al eje longitudinal del objetivo de ensayo situado en el punto más adelantado de la bicicleta y un plano paralelo al eje longitudinal del objetivo de ensayo situado en el punto H del objetivo de ensayo más cercano al vehículo objeto de ensayo [tal y como se define en la norma ISO (CD) 19206-4]. |
|
6.5.2. |
El objetivo de ensayo se acelerará de manera que alcance la velocidad prevista por el ensayo (v) a una distancia no inferior a 15 m del plano correspondiente al lado del vehículo objeto de ensayo más cercano a la dirección de cruce. La velocidad del caso de ensayo se mantendrá hasta que el objetivo se haya alejado al menos 5 m del plano correspondiente al lado opuesto del vehículo. |
|
6.5.3. |
Con arreglo al punto 5.2.2.2, el servicio técnico verificará la activación de la señal de aviso del sistema de información al inicio de la marcha antes de que el objetivo de ensayo (T) alcance una distancia correspondiente al último punto de información (dLPI ) recogido en el cuadro 1 del apéndice 1, y comprobará que la señal de aviso del sistema permanece activada hasta que el objetivo de ensayo haya al menos cruzado el plano de separación correspondiente al lado del vehículo opuesto a la dirección de cruce. No se activará la señal de advertencia de colisión. |
|
6.5.4. |
El servicio técnico repetirá las operaciones de los puntos 6.5.1 a 6.5.3 para dos casos de ensayo del cuadro 1 del apéndice 1 del presente Reglamento y para un caso de ensayo adicional seleccionado de la combinación de un objetivo blando y del intervalo de velocidades de los usuarios vulnerables de la carretera, las direcciones de desplazamiento de dichos usuarios y los límites de detección definidos en el punto 5.2.2.2.
Cuando lo considere justificado, el servicio técnico podrá seleccionar también otros casos de ensayo dentro de la gama de objetivos blandos, velocidades de los usuarios vulnerables de la carretera, direcciones de desplazamiento y límites de detección definidos en el punto 5.2.2.2. |
|
6.6. |
Parada longitudinal para ensayos de inicio de la marcha con ciclistas |
|
6.6.1. |
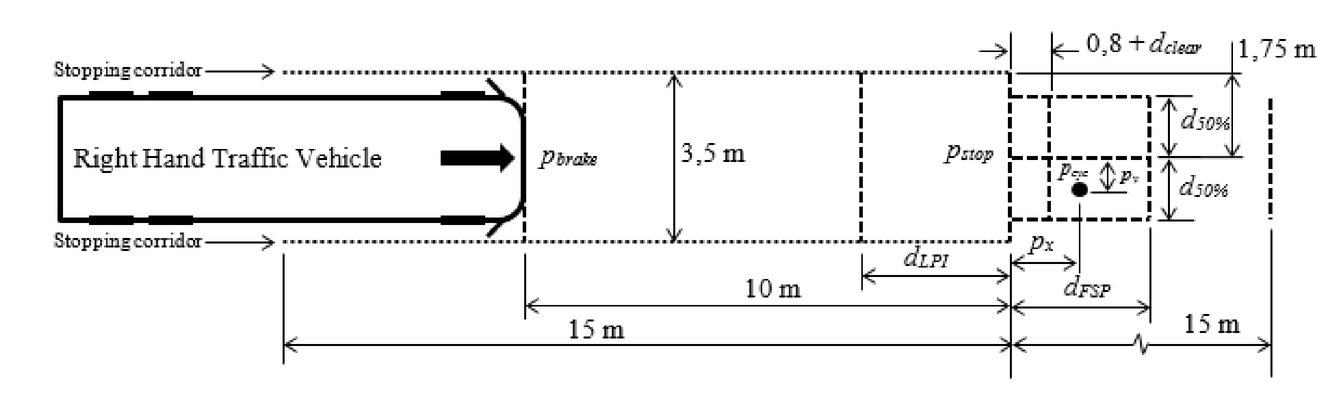
El objetivo de ensayo en forma de ciclista (T) se situará en la zona de ensayo marcada como se muestra en el gráfico 2 del apéndice 1. El objetivo de ensayo en forma de ciclista se situará en el punto de partida del objetivo de ensayo correspondiente (pcyc ) indicado en el cuadro 2 del apéndice 1, orientado en el sentido de la marcha y paralelo al plano longitudinal medio del vehículo objeto de ensayo. El punto de referencia del objetivo de ensayo en forma de ciclista estará en el centro del eje de pedalier y en el eje longitudinal de la bicicleta. En caso de que la distancia entre la parte frontal del vehículo y el extremo posterior del objetivo de ensayo en forma de ciclista sea inferior a 100 mm, pcyc podrá desplazarse una distancia adicional (dclear ) con respecto a la parte frontal del vehículo, en una dirección paralela al plano longitudinal, de manera que haya una distancia de 100 + 10/–0 mm entre la parte frontal del vehículo y el extremo posterior del objetivo de ensayo en forma de ciclista. |
|
6.6.2. |
El vehículo objeto de ensayo se acelerará en línea recta a una velocidad constante de 10 + 0/–0,5 km/h, antes de entrar en el corredor de parada. El vehículo objeto de ensayo mantendrá esta velocidad constante hasta que su parte frontal supere el plano de frenada (pbrake ) que se muestra en el gráfico 2 del apéndice 1, antes de frenar hasta detenerse de forma que la parte frontal del vehículo se sitúe en el plano de parada (pstop ). Se considerará que el vehículo objeto de ensayo se ha detenido cuando haya llegado a una posición de reposo y ya no se encuentre en modo de marcha hacia adelante o tenga la marcha hacia adelante engranada. |
|
6.6.3. |
Transcurridos como mínimo diez segundos desde el momento en el que se considera que el vehículo se ha detenido, el objetivo de ensayo se acelerará en línea recta en una trayectoria paralela al plano longitudinal medio del vehículo a una velocidad de 10 + 0/–0,5 km/h en una distancia de 5 m antes de detenerse. Durante la aceleración, la tolerancia lateral del movimiento del objetivo de ensayo no será superior a ± 0,05 m. |
|
6.6.4. |
Con arreglo al punto 5.2.2.3, el servicio técnico verificará la activación de la señal de aviso del sistema de información al inicio de la marcha antes de que el vehículo objeto de ensayo alcance una distancia del plano de parada (pstop ) correspondiente al último punto de información (dLPI ) que figura en el cuadro 2 del apéndice 1, y la señal de aviso del sistema permanecerá activada hasta que el objetivo de ensayo cruce, como mínimo, una distancia desde la parte frontal del vehículo correspondiente a la distancia de separación máxima hacia adelante (dFSP) indicada en el gráfico 2 del apéndice 1. La señal de advertencia de colisión podrá activarse, según corresponda. |
|
6.6.5. |
El servicio técnico repetirá las operaciones de los puntos 6.6.1 a 6.6.4 para dos casos de ensayo del cuadro 2 del apéndice 1 del presente Reglamento y para un ensayo adicional seleccionando un objetivo de ensayo en forma de ciclista y un punto de partida del ciclista desde el interior de los límites de detección definidos en el punto 5.2.2.3.
Cuando lo considere justificado, el servicio técnico podrá seleccionar también otros casos de ensayo dentro de la gama de objetivos de ensayo en forma de ciclista y de los límites de detección definidos en el punto 5.2.2.3. |
|
6.7. |
Ensayos de inicio longitudinal de la marcha con ciclistas |
|
6.7.1. |
El objetivo de ensayo en forma de ciclista (T) deberá encontrarse en la zona de ensayo marcada como se muestra en el gráfico 2 del apéndice 1. El objetivo de ensayo en forma de ciclista se situará en el punto de partida del objetivo de ensayo correspondiente (pcyc ) indicado en el cuadro 2 del apéndice 1, orientado en el sentido de la marcha y paralelo al plano longitudinal medio del vehículo objeto de ensayo. El punto de referencia del objetivo de ensayo en forma de ciclista estará en el centro del eje de pedalier y en el eje longitudinal de la bicicleta. En caso de que la distancia entre la parte frontal del vehículo y el extremo posterior del objetivo de ensayo en forma de ciclista sea inferior a 100 mm, pcyc podrá desplazarse una distancia adicional (dclear ) con respecto a la parte frontal del vehículo, en una dirección paralela al plano longitudinal, de manera que haya una distancia de 100 + 10/–0 mm entre la parte frontal del vehículo y el extremo posterior del objetivo de ensayo en forma de ciclista. |
|
6.7.2. |
El vehículo objeto de ensayo se acelerará en línea recta a una velocidad constante de 10 + 0/–0,5 km/h, antes de entrar en el corredor de parada. El vehículo objeto de ensayo mantendrá esta velocidad constante hasta que su parte frontal supere el plano de frenada (pbrake ) que se muestra en el gráfico 2 del apéndice 1, antes de frenar hasta detenerse de forma que la parte frontal del vehículo se sitúe en el plano de parada (pstop ). Se considerará que el vehículo objeto de ensayo se ha detenido cuando haya llegado a una posición de reposo y ya no se encuentre en modo de marcha hacia adelante o tenga la marcha hacia adelante engranada. |
|
6.7.3. |
Transcurridos un mínimo de diez segundos desde el momento en el que se considera que el vehículo se ha detenido, el objetivo de ensayo y el vehículo objeto de ensayo se acelerarán al mismo tiempo y en línea recta en una trayectoria paralela al plano longitudinal medio del vehículo objeto de ensayo, a una velocidad constante de 10 + 0/–0,5 km/h en una distancia no superior a 5 m. El vehículo y el objetivo de ensayo mantendrán esta velocidad constante hasta que el vehículo haya recorrido una distancia total no inferior a 15 m desde el punto de parada. La tolerancia lateral del vehículo objeto de ensayo no será superior a ± 0,05 m, mientras que la tolerancia lateral del movimiento del objetivo de ensayo no será superior a ± 0,05 m. La distancia de separación hacia adelante entre la parte frontal del vehículo y el objetivo de ensayo en movimiento se mantendrá dentro de los límites de los planos de separación máxima y mínima hacia adelante. |
|
6.7.4. |
Con arreglo al punto 5.2.2.3, el servicio técnico verificará la activación de la señal de aviso del sistema de información al inicio de la marcha antes de que el vehículo objeto de ensayo alcance una distancia desde el plano de parada (pstop ) correspondiente al último punto de información (dLPI ) del cuadro 2 del apéndice 1, y dicha señal de aviso del sistema permanecerá activada hasta que el vehículo objeto de ensayo recorra una distancia de 15 m desde el punto de parada. La señal de advertencia de colisión podrá activarse, según corresponda. |
|
6.7.5. |
El servicio técnico repetirá las operaciones de los puntos 6.7.1 a 6.7.4 para dos casos de ensayo del cuadro 2 del apéndice 1 del presente Reglamento y para un ensayo adicional seleccionando un objetivo de ensayo en forma de ciclista y un punto de partida del ciclista desde el interior de los límites de detección definidos en el punto 5.2.2.3.
Cuando lo considere justificado, el servicio técnico podrá seleccionar también otros casos de ensayo dentro de la gama de objetivos de ensayo en forma de ciclista y de los límites de detección definidos en el punto 5.2.2.3. |
|
6.8. |
Ensayo de detección de fallos |
|
6.8.1. |
Simular un fallo del sistema de información al inicio de la marcha, por ejemplo, desconectando la fuente de alimentación de cualquiera de sus componentes o cortando cualquier conexión eléctrica entre ellos. Al simular un fallo en el sistema, no se desconectarán las conexiones eléctricas correspondientes a la señal de advertencia de fallo mencionada en el apartado 5.8. |
|
6.8.2. |
Se activará y se mantendrá activada la señal de advertencia de fallo mencionada en el apartado 5.8 mientras el vehículo esté circulando y se reactivará con cada activación del interruptor principal de control del vehículo mientras persista el fallo simulado. |
|
6.9. |
Ensayo de desactivación automática |
|
6.9.1. |
Con el sistema de información al inicio de la marcha activo, ensuciar completamente cualquiera de los sensores del sistema con una sustancia parecida a la nieve, el hielo o el barro (por ejemplo, con una base de agua). El sistema de información al inicio de la marcha deberá desactivarse automáticamente e indicar esta situación, tal como se especifica en el apartado 5.8. |
|
6.9.2. |
Eliminar completamente toda la suciedad de los sensores del sistema y reactivar el interruptor principal de control del vehículo. El sistema de información al inicio de la marcha deberá reactivarse automáticamente después de un tiempo de conducción no superior a sesenta segundos. |
7. MODIFICACIÓN DEL TIPO DE VEHÍCULO Y EXTENSIÓN DE LA HOMOLOGACIÓN DE TIPO
|
7.1. |
Toda modificación del tipo de vehículo con arreglo a la definición del apartado 2.3 del presente Reglamento deberá notificarse a la autoridad de homologación de tipo que lo haya homologado. Esta podrá entonces: |
|
7.1.1. |
Considerar que las modificaciones realizadas no tienen un efecto adverso en las condiciones de concesión de la homologación y conceder entonces una extensión de la homologación. |
|
7.1.2. |
Considerar que las modificaciones realizadas afectan a las condiciones de concesión de la homologación y exigir más ensayos o controles adicionales antes de conceder una extensión de la homologación. |
|
7.2. |
La confirmación o la denegación de la homologación se comunicará a las Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante el procedimiento indicado en el apartado 4.4, y se precisarán las modificaciones en cuestión. |
|
7.3. |
La autoridad de homologación de tipo informará de la extensión a las demás Partes contratantes mediante el formulario de comunicación que figura en el anexo 1 del presente Reglamento. Además, asignará un número de serie a cada extensión, denominado número de extensión. |
8. CONFORMIDAD DE LA PRODUCCIÓN
|
8.1. |
Los procedimientos relativos a la conformidad de la producción deberán ajustarse a las disposiciones generales definidas en el artículo 2 y en el anexo 1 del Acuerdo de 1958 (E/ECE/TRANS/505/Rev.3) y deberán cumplir los requisitos siguientes: |
|
8.2. |
Todo vehículo homologado con arreglo al presente Reglamento deberá fabricarse de modo que sea conforme con el tipo homologado, es decir, cumpliendo los requisitos del apartado 5. |
|
8.3. |
La autoridad de homologación de tipo que haya concedido la homologación podrá verificar en todo momento la conformidad de los métodos de control aplicables a cada unidad de producción. La frecuencia normal de dichas inspecciones será de una vez cada dos años. |
9. SANCIONES POR FALTA DE CONFORMIDAD DE LA PRODUCCIÓN
|
9.1. |
Se podrá retirar la homologación concedida a un tipo de vehículo con arreglo al presente Reglamento si no se cumplen los requisitos exigidos en el punto 8. |
|
9.2. |
Cuando una Parte contratante retire una homologación que había concedido con anterioridad, informará inmediatamente de ello a las demás Partes contratantes que apliquen el presente Reglamento enviándoles un formulario de comunicación conforme con el modelo del anexo 1 del presente Reglamento. |
10. CESE DEFINITIVO DE LA PRODUCCIÓN
Cuando el titular de una homologación cese definitivamente de fabricar un tipo de vehículo homologado con arreglo al presente Reglamento, informará de ello a la autoridad de homologación de tipo que la concedió, quien, a su vez, informará inmediatamente a las demás Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante un formulario de comunicación conforme al modelo que figura en el anexo 1 del presente Reglamento.
11. NOMBRE Y DIRECCIÓN DE LOS SERVICIOS TÉCNICOS ENCARGADOS DE REALIZAR LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes contratantes del Acuerdo que apliquen el presente Reglamento comunicarán a la Secretaría de las Naciones Unidas el nombre y la dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo que concedan la homologación y a las cuales deban remitirse los formularios que certifiquen la concesión, la extensión, la denegación o la retirada de la homologación.
(1) Véase el anexo 1 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6-www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Los números distintivos de las Partes contratantes del Acuerdo de 1958 figuran en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6-www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
Apéndice 1
Se aplicarán las siguientes definiciones:
|
dw |
anchura del vehículo |
|
d25 % |
una distancia correspondiente al 25 % de la anchura del vehículo |
|
dNSP |
distancia desde el plano del vehículo del lado del copiloto hasta el plano de separación del lado del copiloto, fijada en 0,5 m |
|
dOSP |
distancia desde el plano del vehículo del lado del conductor hasta el plano de separación del lado del conductor, fijada en 0,5 m |
|
dTC |
distancia de separación hacia adelante para cada caso de ensayo |
|
dFSP |
distancia desde la parte frontal del vehículo hasta el plano de separación máxima hacia adelante |
|
dLPI |
distancia correspondiente al último punto de información (UPI) |
Cuadro 1
Casos de ensayo para ensayos de cruce estáticos
|
Caso de ensayo |
Objetivo blando (T) |
Distancia del caso de ensayo (dTC)/m |
Dirección de cruce (c) |
Velocidad del objetivo blando (v)/km/h |
Distancia al último punto de información (dLPI)/m |
|
1 |
Peatón niño |
0,8 |
Lado del copiloto |
3 |
dNSP |
|
2 |
Peatón adulto |
dFSP |
Lado del copiloto |
3 |
dNSP |
|
3 |
Ciclista adulto |
0,8 |
Lado del conductor |
3 |
dOSP |
|
4 |
Ciclista adulto |
dFSP |
Lado del copiloto |
5 |
dNSP |
|
5 |
Peatón adulto |
0,8 |
Lado del conductor |
5 |
dOSP |
|
6 |
Peatón niño |
dFSP |
Lado del conductor |
5 |
dOSP |
Se aplicarán las siguientes definiciones:
|
d50 % |
distancia correspondiente al 50 % de la anchura del vehículo |
|
pbrake |
plano de frenado del vehículo |
|
pstop |
plano de parada del vehículo |
|
dFSP |
distancia desde el plano de parada del vehículo hasta el plano de separación máxima hacia adelante |
|
dclear |
distancia adicional de separación en la que se coloca el objetivo de ensayo en forma de ciclista para garantizar al menos una distancia de 100 mm entre la parte frontal del vehículo y el extremo posterior del objetivo de ensayo en forma de ciclista |
|
pcyc |
punto de partida del objetivo de ensayo en forma de ciclista, tomado desde el punto de referencia de dicho objetivo de ensayo |
|
px |
distancia entre el plano de parada y el punto de partida del objetivo de ensayo en forma de ciclista |
|
py |
distancia entre el plano longitudinal medio del vehículo y el punto de partida del objetivo de ensayo en forma de ciclista, siendo el lado del vehículo del copiloto la dirección positiva |
|
dLPI |
distancia entre la línea del último punto de información (UPI) y el plano de parada del vehículo |
Cuadro 2
Casos de ensayo para ensayos longitudinales con ciclistas
|
Caso de ensayo |
Objetivo de ensayo (T) |
Distancia al punto de partida hacia adelante del ciclista (px)/m |
Distancia al punto de partida lateral del ciclista (py)/m |
Distancia al último punto de información (dLPI)/m |
|
1 |
Ciclista adulto |
0,8 + dclear |
+ d50 % |
dFSP – 0,8 – dclear |
|
2 |
Ciclista adulto |
0,8 + dclear |
0,0 |
dFSP – 0,8 – dclear |
|
3 |
Ciclista adulto |
0,8 + dclear |
–d50 % |
dFSP – 0,8 – dclear |
|
4 |
Ciclista adulto |
dFSP – 0,1 |
+ d50 % |
0,1 |
|
5 |
Ciclista adulto |
dFSP – 0,1 |
0,0 |
0,1 |
|
6 |
Ciclista adulto |
dFSP – 0,1 |
–d50 % |
0,1 |
[Formato máximo: A4 (210 × 297 mm)]
|
|
expedida por: |
(Nombre de la administración) … … … |
|
relativa a: (2) |
la concesión de la homologación |
|
|
la extensión de la homologación |
|
|
la denegación de la homologación |
|
|
la retirada de la homologación |
|
|
el cese definitivo de la producción |
de un tipo de vehículo con respecto al sistema de información al inicio de la marcha con arreglo al Reglamento n.o 159 de las Naciones Unidas
N.o de homologación: …
|
1. |
Marca: … |
|
2. |
Tipo y denominaciones comerciales: … |
|
3. |
Nombre y dirección del fabricante: … |
|
4. |
En su caso, nombre y dirección del representante del fabricante: … |
|
5. |
Breve descripción del vehículo: … |
|
6. |
Fecha de presentación del vehículo para su homologación: … |
|
7. |
Servicio técnico que realiza los ensayos de homologación: … |
|
8. |
Fecha del acta de ensayo expedida por dicho servicio: … |
|
9. |
N.o del acta de ensayo expedida por dicho servicio: … |
|
10. |
Motivos de la extensión (si procede): … |
|
11. |
Homologación con respecto al sistema de información al inicio de la marcha concedida/denegada2: … |
|
12. |
Lugar: … |
|
13. |
Fecha: … |
|
14. |
Firma: … |
|
15. |
Se adjuntan a la presente comunicación los siguientes documentos, con el número de homologación indicado previamente: … |
|
16. |
Observaciones: … |
(1) Número de identificación del país que ha concedido/extendido/denegado/retirado la homologación (véanse las disposiciones de homologación del presente Reglamento).
(2) Táchese lo que no proceda.
(véanse los puntos 4.5 a 4.5.2 del presente Reglamento)
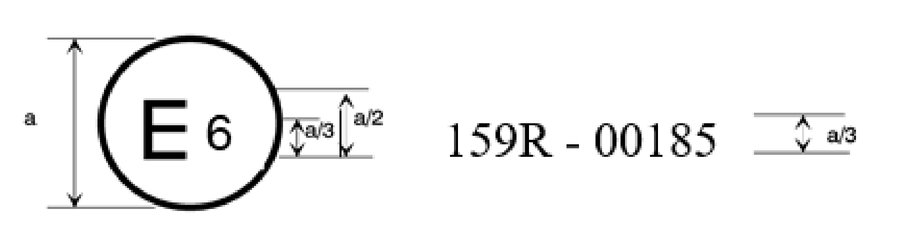
a = 8 mm mín.
Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión ha sido homologado en Bélgica (E 6), por lo que respecta al sistema de información al inicio de la marcha, con arreglo al Reglamento n.o 159 de las Naciones Unidas. Los dos primeros dígitos del número de homologación indican que esta se concedió de acuerdo con los requisitos del Reglamento n.o 159 de las Naciones Unidas en su versión original.
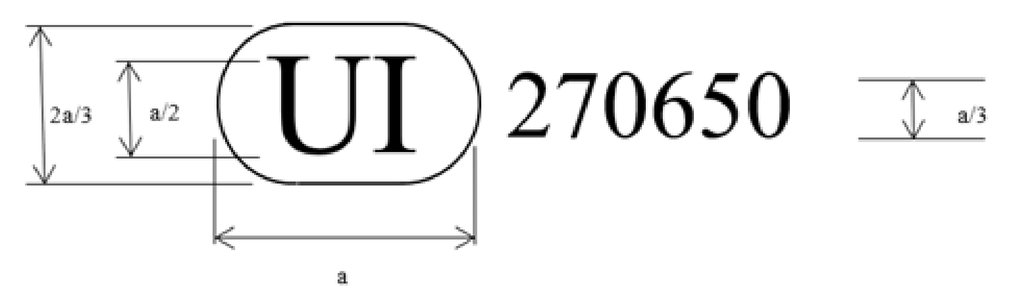
a ≥ 8 mm
Este identificador único muestra que el tipo correspondiente ha sido homologado y que la información pertinente sobre dicha homologación de tipo puede consultarse en la base de datos segura de internet de las Naciones Unidas utilizando el código 270650 como identificador único. Los ceros a la izquierda del identificador único pueden omitirse en el marcado de homologación.
1. LÍMITE DEL ÁNGULO MUERTO
El límite del ángulo muerto definido en el punto 2.22 del presente Reglamento pueden determinarse mediante el método descrito en el presente anexo.
2. MÉTODOS DE ENSAYO
|
2.1. |
El objeto de ensayo será un cilindro de 50 ± 2 mm de diámetro externo provisto de un anillo de un espesor de 10 ± 2 mm que contraste en color con el resto del objeto de ensayo, situado de forma que su extremo inferior esté a 900 ± 2 mm de la base de dicho objeto. |
|
2.2. |
Las condiciones de ensayo serán las definidas en el punto 6.2 del presente Reglamento |
|
2.3. |
Las condiciones del vehículo serán las definidas en el punto 6.3 del presente Reglamento |
|
2.4. |
La zona de ensayo se marcará tal y como se muestra en el gráfico 1 del presente anexo.
Se aplicarán las siguientes definiciones:
|
|
2.5. |
El punto de referencia ocular será conforme a lo definido en el punto 2.11 del presente Reglamento. |
|
2.6. |
Procedimiento de ensayo |
|
2.6.1. |
Situar una cámara fija, una videocámara, o una cámara digital equivalente, de 35 mm o un formato superior, de manera que el centro del plano de la imagen de la cámara esté colocado en el punto de referencia ocular.
La cámara deberá ofrecer una imagen del objeto de ensayo en todas las posibles posiciones de ensayo. En caso de que la cámara deba recolocarse para visualizar todas las posibles posiciones de ensayo, se verificará que el centro del plano de la imagen de la cámara para todas las posibles posiciones de la cámara esté situado en el punto de referencia ocular. |
|
2.6.2. |
Se registrará la visibilidad de la totalidad del anillo del objeto de ensayo desde el punto de referencia ocular para las posiciones del objeto de ensayo situadas dentro de la zona limitada por los planos de separación máxima y mínima hacia adelante y los planos de separación de los lados del copiloto y del conductor. |
|
2.6.3. |
A partir del plano de separación mínima hacia adelante, alejar el objeto de ensayo de la parte frontal del vehículo en un plano de evaluación paralelo al plano longitudinal medio del vehículo hasta que se alcance el plano de separación máxima hacia adelante. |
|
2.6.4. |
Se registrará la visibilidad del anillo del objeto de ensayo a intervalos no superiores a 150 mm de distancia a lo largo del plano de evaluación. |
|
2.6.5. |
Este proceso se repetirá para los planos de evaluación entre los planos de separación del lado del copiloto y del lado del conductor, con distancias no superiores a 150 mm entre cada plano de evaluación. |
|
2.6.6. |
El servicio técnico podrá considerar como equivalentes otros enfoques distintos a los métodos mencionados, como procedimientos basados en CAD o en tecnologías láser, si se proporcionan pruebas documentales que permitan verificar que se han cumplido los requisitos de los procedimientos de ensayo descritos en el presente anexo. |
3. DEFINICIÓN DEL LÍMITE DEL ÁNGULO MUERTO
|
3.1. |
La zona del ángulo muerto vendrá determinada por todas las posiciones del objeto de ensayo en las que la totalidad del anillo del objeto de ensayo no sea visible desde el punto de referencia ocular. |
|
3.2. |
El límite del ángulo muerto se determinará en la primera posición fuera de la zona del ángulo muerto en la que la totalidad del anillo del objeto de ensayo sea visible desde el punto de referencia ocular. |
Agencia Estatal Boletín Oficial del Estado
Avda. de Manoteras, 54 - 28050 Madrid