Butlletí Oficial de l'Estat






Contingut no disponible en català
Solo los textos originales de la CEPE surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben verificarse en la última versión del documento de situación de la CEPE TRANS/WP.29/343, disponible en: http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Reglamento n.o 157 de las Naciones Unidas — Disposiciones uniformes relativas a la homologación de los vehículos de motor por lo que respecta al sistema automático de mantenimiento del carril [2021/389]
Fecha de entrada en vigor: 22 de enero de 2021
Este documento es exclusivamente un instrumento de documentación. El texto auténtico y jurídicamente vinculante es el siguiente: ECE/TRANS/WP.29/2020/81.
ÍNDICE
REGLAMENTO
Introducción
|
1. |
Ámbito de aplicación y objeto |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Seguridad del sistema y respuesta a prueba de fallos |
|
6. |
Interfaz persona-máquina / información para el operador |
|
7. |
Detección de objetos y eventos y respuesta |
|
8. |
Sistema de almacenamiento de datos para conducción autónoma |
|
9. |
Ciberseguridad y actualizaciones de software |
|
10. |
Modificación del tipo de vehículo y extensión de la homologación |
|
11. |
Conformidad de la producción |
|
12. |
Sanciones por falta de conformidad de la producción |
|
13. |
Cese definitivo de la producción |
|
14. |
Nombres y direcciones de los servicios técnicos responsables de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
|
1 |
Comunicación |
|
2 |
Disposiciones relativas a las marcas de homologación |
|
3 |
(Reservado) |
|
4 |
Requisitos especiales aplicables a los aspectos relativos a la seguridad de los sistemas electrónicos de control y auditoría |
|
5 |
Especificaciones de ensayo del sistema automático de mantenimiento del carril |
INTRODUCCIÓN
El Reglamento tiene por objeto establecer disposiciones uniformes relativas a la homologación de los vehículos de motor por lo que respecta al sistema automático de mantenimiento del carril.
El sistema automático de mantenimiento del carril controla el movimiento lateral y longitudinal del vehículo durante períodos prolongados sin una nueva orden del conductor. Es un sistema que, cuando está activado, conserva el control primario del vehículo.
El presente Reglamento es el primer paso normativo para un sistema de conducción autónoma (conforme a la definición recogida en ECE/TRANS/WP.29/1140) en el tráfico y, por tanto, establece disposiciones innovadoras dirigidas a resolver la complejidad relacionada con la evaluación de la seguridad del sistema. Contiene disposiciones administrativas adecuadas en materia de homologación de tipo, requisitos técnicos, disposiciones de auditoría y notificación, y disposiciones relativas a ensayos.
El sistema automático de mantenimiento del carril puede activarse en determinadas condiciones en carreteras en las que está prohibida la circulación de peatones y ciclistas y cuyo diseño incluye una separación física del tráfico en sentidos opuestos y evita que el tráfico se interponga en la trayectoria del vehículo. En un primer paso, el texto original del presente Reglamento limita la velocidad operativa a un máximo de 60 km/h y turismos (vehículos M1).
El presente Reglamento contiene requisitos generales relativos a la seguridad del sistema y la respuesta a prueba de fallos. Al activarse, el sistema automático de mantenimiento del carril realizará la tarea de conducción en lugar del conductor, es decir, gestionará todas las situaciones, fallos incluidos, sin poner en peligro la seguridad de los ocupantes del vehículo ni de otros usuarios de la vía. Sin embargo, siempre existe la posibilidad de que el conductor anule la acción del sistema en cualquier momento.
El Reglamento también establece requisitos que determinan cómo debe el sistema automático de mantenimiento del carril devolver la tarea de conducción al conductor de forma segura, incluida la capacidad del sistema de parar el vehículo en el caso de que el conductor no responda adecuadamente.
Por último, el Reglamento recoge los requisitos sobre la interfaz persona-máquina (IPM) para evitar errores de comprensión o usos indebidos por parte del conductor. Por ejemplo, el Reglamento establece que las pantallas de a bordo que utilice el conductor para cualquier actividad que no sea conducir mientras el sistema automático de mantenimiento del carril permanezca activado deberán quedar automáticamente suspendidas en cuanto el sistema emita una demanda de transición. Estas medidas se adoptan sin perjuicio de las normas de comportamiento del conductor relativas a la forma de uso de estos sistemas en las Partes Contratantes que son actualmente objeto de discusión en el Foro Mundial para la Seguridad Vial (WP.1) en el momento de redactarse el presente documento (véase, por ejemplo, el documento informal 4, revisión 1, del septuagésimo octavo período de sesiones del WP.1).
1. ÁMBITO DE APLICACIÓN Y OBJETO
|
1.1. |
El presente Reglamento es aplicable a la homologación de tipo de los vehículos a motor de la categoría M1 (1) por lo que respecta a su sistema automático de mantenimiento del carril. |
2. DEFINICIONES
A efectos del presente Reglamento, serán aplicables las definiciones siguientes:
|
2.1. |
El «sistema automático de mantenimiento del carril» para circulación a baja velocidad es un sistema activado por el conductor que mantiene el vehículo dentro de su carril a una velocidad máxima de 60 km/h mientras controla los movimientos laterales y longitudinales del vehículo durante períodos prolongados sin necesidad de intervención del conductor.
En el presente Reglamento, se entiende que «el sistema» es el sistema automático de mantenimiento del carril. |
|
2.1.1. |
El «tipo de vehículo por lo que respecta al sistema automático de mantenimiento del carril» es una categoría de vehículos que no difieren en aspectos esenciales como:
|
|
2.2. |
La «demanda de transición» es un procedimiento lógico e intuitivo para transferir la tarea de conducción dinámica del sistema (control automático) al conductor humano (control manual). Esta petición es enviada por el sistema al conductor humano. |
|
2.3. |
La «fase de transición» es la duración de la demanda de transición. |
|
2.4. |
Un «evento planificado» es una situación que se conoce de antemano, por ejemplo, en el momento de la activación, como un punto del recorrido (por ejemplo, la salida de una autopista), etc., y que requiere una demanda de transición. |
|
2.5. |
Un «evento no planificado» es una situación que no se conoce de antemano, pero se presupone que es muy probable que ocurra —por ejemplo, una carretera en obras, malas condiciones meteorológicas, la aproximación de un vehículo de emergencias, la ausencia de marcas de carriles, la caída de la carga de un camión (colisión)— y que requiere una demanda de transición. |
|
2.6. |
«Riesgo de colisión inminente» describe una situación o un evento que da lugar a la colisión del vehículo con otro usuario de la vía o un obstáculo que no se puede evitar mediante una demanda de frenado de menos de 5 m/s2. |
|
2.7. |
Una «maniobra de riesgo mínimo» es un procedimiento destinado a reducir al mínimo los riesgos en el tráfico, que es realizado automáticamente por el sistema tras una demanda de transición sin respuesta del conductor o en caso de fallo grave del sistema automático de mantenimiento del carril o del vehículo. |
|
2.8. |
Una «maniobra de emergencia» es una maniobra que realiza el sistema si se produce un evento que entraña un riesgo inminente de colisión del vehículo y tiene la finalidad de evitar o mitigar dicha colisión. |
|
2.9. |
Velocidad |
|
2.9.1. |
La «velocidad máxima especificada» es la velocidad máxima a la que el cliente ha declarado que el sistema puede funcionar de manera segura en condiciones óptimas. |
|
2.9.2. |
La «velocidad máxima en servicio» es la velocidad seleccionada por el sistema como máxima para funcionar en las actuales condiciones ambientales y de detección. Es la máxima velocidad del vehículo a la que el sistema puede permanecer activo y vendrá determinada por la capacidad del sistema de detección y por las condiciones ambientales. |
|
2.9.3. |
La «velocidad actual» o «velocidad» es la velocidad actualmente seleccionada por el sistema en función del tráfico. |
|
2.10. |
El «alcance de detección» del sistema de detección es la distancia a la que el sistema puede reconocer un objetivo de manera fiable —teniendo en cuenta el deterioro de los componentes del sistema de detección debido al paso del tiempo y al uso durante toda la vida útil del vehículo— y generar una señal de control. |
|
2.11. |
Fallos |
|
2.11.1. |
Un «fallo del sistema automático de mantenimiento del carril» es cualquier fallo aislado específico del funcionamiento de dicho sistema (por ejemplo, el fallo aislado de un sensor o la pérdida de datos necesarios para calcular la trayectoria de conducción del vehículo). |
|
2.11.2. |
El «modo de fallo» es el estado de funcionamiento del sistema en el que este funciona con un fallo del sistema automático de mantenimiento del carril. |
|
2.11.3. |
Un «fallo grave del sistema automático de mantenimiento del carril» es un fallo específico del funcionamiento de dicho sistema que afecta a la seguridad del funcionamiento del sistema cuando está en modo de fallo con una probabilidad muy baja de incidencia, como la que se considera en general para componentes esenciales, por ejemplo, una unidad de control electrónico. Los fallos de sensores aislados solo se tienen en cuenta cuando van acompañados de otro factor que afecta a la seguridad del funcionamiento del sistema. |
|
2.11.4. |
Un «fallo grave del vehículo» es cualquier fallo del vehículo (por ejemplo, eléctrico o mecánico) que afecta a la capacidad del sistema automático de mantenimiento del carril para realizar la tarea de conducción dinámica y que puede afectar también al funcionamiento manual del vehículo (por ejemplo, pérdida de alimentación eléctrica, fallo del sistema de frenado o pérdida repentina de presión en los neumáticos). |
|
2.12. |
La «autocomprobación» es una función integrada que busca fallos en el sistema y comprueba el alcance de detección del sistema de detección de manera continua. |
|
2.13. |
La «anulación del sistema» por el conductor es una situación en la que el conductor envía una señal a un control que tiene prioridad sobre el control longitudinal o lateral del sistema, mientras el sistema permanece activo. |
|
2.14. |
La «tarea de conducción dinámica» consiste en el control y la ejecución de todos los movimientos longitudinales y laterales del vehículo. |
|
2.15. |
El «sistema de almacenamiento de datos para la conducción autónoma» permite determinar las interacciones entre el sistema automático de mantenimiento del carril y el conductor humano. |
|
2.16. |
La «vida útil del sistema» es el período durante el cual el sistema automático de mantenimiento del carril permanece disponible como función del vehículo. |
|
2.17. |
Una «incidencia» es, en el contexto de las disposiciones sobre el sistema de almacenamiento de datos para la conducción autónoma a que se refiere el punto 8, una acción o instancia de un evento o incidente que debe almacenarse en el sistema de almacenamiento de datos. |
|
2.18. |
El «número de identificación de software R157 (R157 SWIN)» es un identificador específico, definido por el fabricante del vehículo, que refleja la información relativa al software del sistema electrónico de control pertinente para la homologación de tipo que contribuye a las características del vehículo pertinentes para la homologación de tipo en virtud del Reglamento n.o 157 de las Naciones Unidas. |
|
2.19. |
El «sistema de control electrónico» es una combinación de unidades diseñadas para producir conjuntamente la función automática de mantenimiento del carril declarada, por medio del tratamiento electrónico de los datos. Estos sistemas, controlados a menudo mediante software, se construyen a partir de componentes funcionales diferenciados, como sensores, unidades de control electrónico y actuadores, y se conectan mediante enlaces de transmisión. Pueden comprender elementos mecánicos, electroneumáticos o electrohidráulicos. |
|
2.20. |
El «software» es parte de un sistema de control electrónico consistente en datos digitales e instrucciones. |
3. SOLICITUD DE HOMOLOGACIÓN
|
3.1. |
La solicitud de homologación de un tipo de vehículo por lo que respecta al sistema automático de mantenimiento del carril deberá ser presentada por el fabricante del vehículo o su representante autorizado. |
|
3.2. |
Deberá ir acompañada de los documentos que se mencionan a continuación, por triplicado: |
|
3.2.1. |
Una descripción del tipo de vehículo por lo que se respecta a los equipos mencionados en el punto 2.1.1, junto con la documentación requerida en el anexo 4 que muestre el diseño básico del sistema automático de mantenimiento del carril y los medios por los que se conecta con otros sistemas del vehículo o mediante los cuales controla directamente las variables de salida. Deberán precisarse los números o símbolos identificativos del tipo de vehículo. |
|
3.3. |
Deberá presentarse al servicio técnico encargado de realizar los ensayos de homologación un vehículo representativo del tipo cuya homologación se solicite. |
4. HOMOLOGACIÓN
|
4.1. |
Si el tipo de vehículo presentado para homologación con arreglo al presente Reglamento cumple los requisitos de los puntos 5 a 9 siguientes, se concederá la homologación. |
|
4.2. |
Se asignará un número de homologación a cada tipo homologado; sus dos primeros dígitos (en la actualidad 00, que corresponden a la serie 00 de enmiendas, su versión original) indicarán la serie de enmiendas que incorpore las enmiendas técnicas importantes más recientes introducidas en el Reglamento en el momento en que se expidió la homologación. La misma Parte contratante no asignará el mismo número a otro tipo de vehículo. |
|
4.3. |
La concesión, la denegación o la retirada de la homologación con arreglo al presente Reglamento se comunicarán a las Partes del Acuerdo de 1958 que apliquen este Reglamento por medio de un formulario conforme con el modelo del anexo 1, junto con la documentación facilitada por el solicitante en un formato no superior a A4 (210 × 297 mm), o plegada en dicho formato, y a una escala adecuada, o bien en formato electrónico. |
|
4.4. |
Todo vehículo conforme con un tipo de vehículo homologado con arreglo al presente Reglamento deberá llevar, de manera claramente visible y en un lugar de fácil acceso especificado en el formulario de homologación, una marca de homologación internacional conforme con el modelo descrito en el anexo 2 y consistente en: |
|
4.4.1. |
Un círculo dentro del cual figura la letra «E» seguida del número distintivo del país que ha concedido la homologación (2). |
|
4.4.2. |
El número del presente Reglamento, seguido de la letra «R», un guion y el número de homologación a la derecha del círculo descrito en el punto 4.4.1. |
|
4.5. |
Si el vehículo se ajusta a un tipo de vehículo homologado de acuerdo con uno o varios Reglamentos adjuntos al Acuerdo en el país en el que se haya concedido la homologación con arreglo al presente Reglamento, no es necesario repetir el símbolo que se establece en el punto 4.4.1; en ese caso, los números del Reglamento y de la homologación, así como los símbolos adicionales, se colocarán en columnas verticales a la derecha del símbolo descrito en el punto 4.4.1. |
|
4.6. |
La marca de homologación aparecerá claramente legible y será indeleble. |
|
4.7. |
La marca de homologación se situará en la placa informativa del vehículo o cerca de ella. |
5. SEGURIDAD DEL SISTEMA Y RESPUESTA A PRUEBA DE FALLOS
|
5.1. |
Requisitos generales
El fabricante deberá demostrar, a satisfacción del servicio técnico, que se cumplen las disposiciones de este punto durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 (en particular en relación con las condiciones no ensayadas en virtud del anexo 5) y con arreglo a los ensayos pertinentes establecidos en el anexo 5. |
|
5.1.1. |
El sistema activado realizará la tarea de conducción dinámica, gestionará todas las situaciones, fallos incluidos, y no entrañará riesgos excesivos para los ocupantes del vehículo ni para otros usuarios de la vía.
El sistema activado no provocará colisiones que sean razonablemente previsibles y evitables. Si una colisión puede evitarse de manera segura sin causar otra, deberá evitarse. Cuando el vehículo se vea involucrado en una colisión detectable, se detendrá. |
|
5.1.2. |
El sistema activado cumplirá las normas de tráfico relacionadas con la tarea de conducción dinámica en el país de circulación. |
|
5.1.3. |
El sistema activado controlará los sistemas requeridos para ayudar al conductor a retomar el control manual en cualquier momento (por ejemplo, desempañador, limpiaparabrisas y luces). |
|
5.1.4. |
Las demandas de transición no pondrán en peligro la seguridad de los ocupantes del vehículo ni de otros usuarios de la vía. |
|
5.1.5. |
Si el conductor no retoma el control de la tarea de conducción dinámica durante la fase de transición, el sistema realizará una maniobra de riesgo mínimo. Durante la maniobra de riesgo mínimo, el sistema minimizará los riesgos para la seguridad de los ocupantes del vehículo y de otros usuarios de la vía. |
|
5.1.6. |
El sistema realizará autocomprobaciones para detectar la incidencia de fallos y para confirmar el rendimiento del sistema en todo momento (por ejemplo, después de arrancar el vehículo, el sistema ha detectado al menos en una ocasión un objeto a la misma o mayor distancia que la declarada como alcance de detección con arreglo al punto 7.1). |
|
5.1.7. |
La eficacia del sistema no deberá verse mermada a causa de interferencias producidas por campos magnéticos o eléctricos. Esto quedará demostrado por el cumplimiento de lo dispuesto en el Reglamento n.o 10 de las Naciones Unidas, serie 05 de enmiendas o posterior. |
|
5.1.8. |
El fabricante adoptará medidas de protección contra usos indebidos por parte del conductor que sean razonablemente previsibles y contra manipulaciones indebidas del sistema. |
|
5.1.9. |
Cuando el sistema ya no pueda cumplir los requisitos del presente Reglamento, no será posible activarlo.
El fabricante deberá declarar e implantar un proceso para gestionar la seguridad y el cumplimiento continuado del sistema automático de mantenimiento del carril a lo largo de su vida útil. |
|
5.2. |
Tarea de conducción dinámica
El fabricante deberá demostrar, a satisfacción del servicio técnico, que se cumplen las disposiciones de este punto durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 (en particular en relación con las condiciones no ensayadas en virtud del anexo 5) y con arreglo a los ensayos pertinentes establecidos en el anexo 5. |
|
5.2.1. |
El sistema activado mantendrá el vehículo dentro del carril por el que circule y velará por que no se salga de las marcas del carril (borde exterior del neumático delantero hasta el borde exterior de la marca del carril). El sistema actuará para mantener el vehículo en una posición lateral estable dentro del carril de circulación a fin de evitar confundir a otros usuarios de la vía. |
|
5.2.2. |
El sistema activado detectará los vehículos que circulen en un carril adyacente como se define en el punto 7.1.2. y, si es necesario, ajustará la velocidad o la posición lateral del vehículo dentro de su carril según proceda. |
|
5.2.3. |
El sistema activado controlará la velocidad del vehículo. |
|
5.2.3.1. |
La velocidad máxima a la que está permitido el funcionamiento del sistema es de 60 km/h. |
|
5.2.3.2. |
El sistema activado adaptará la velocidad del vehículo a las condiciones infraestructurales y ambientales (por ejemplo, curvas estrechas o malas condiciones meteorológicas). |
|
5.2.3.3. |
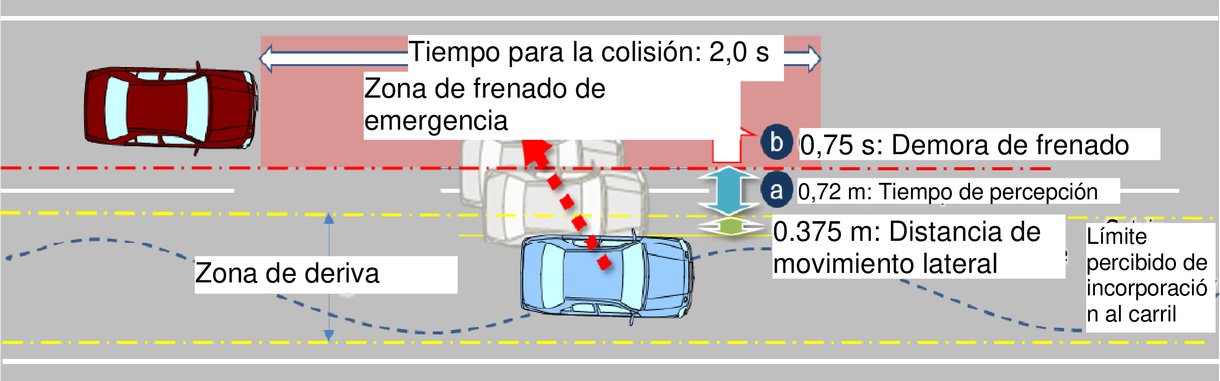
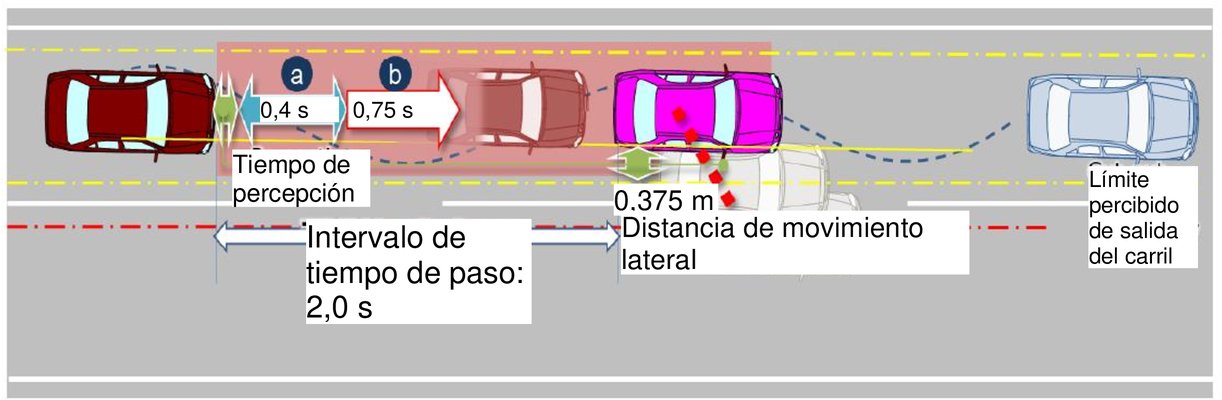
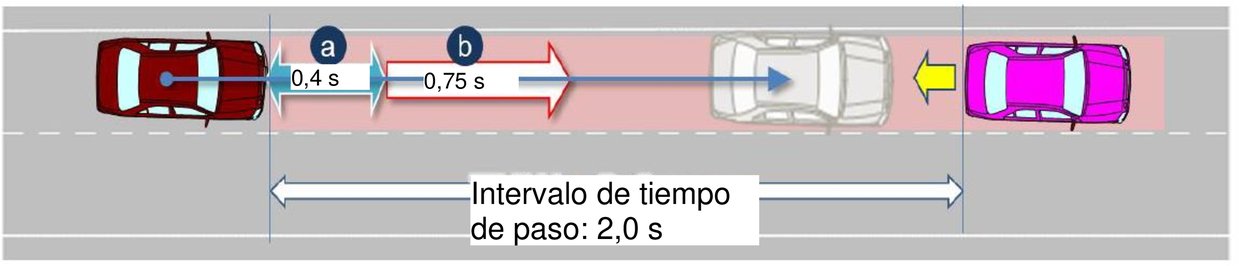
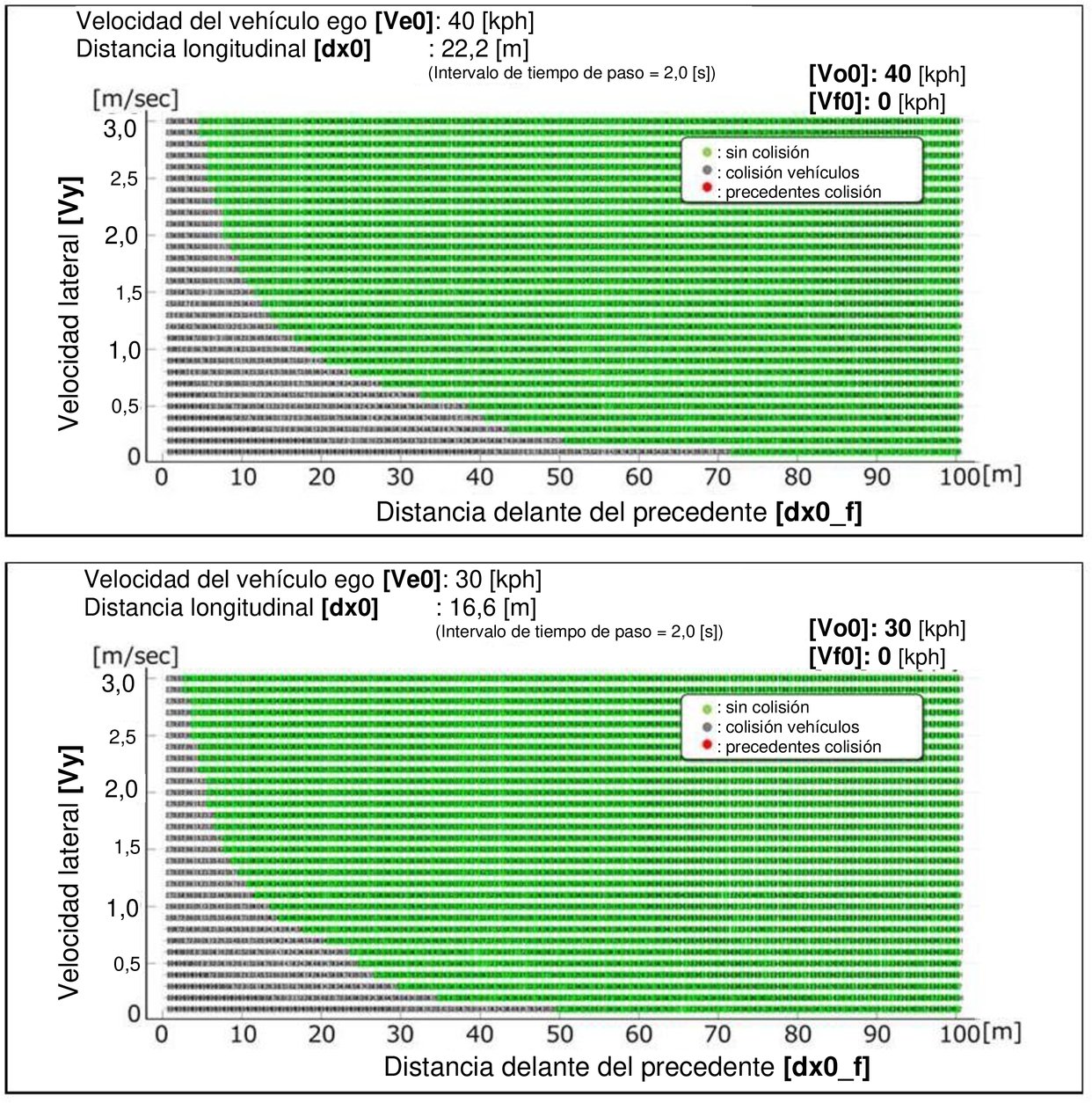
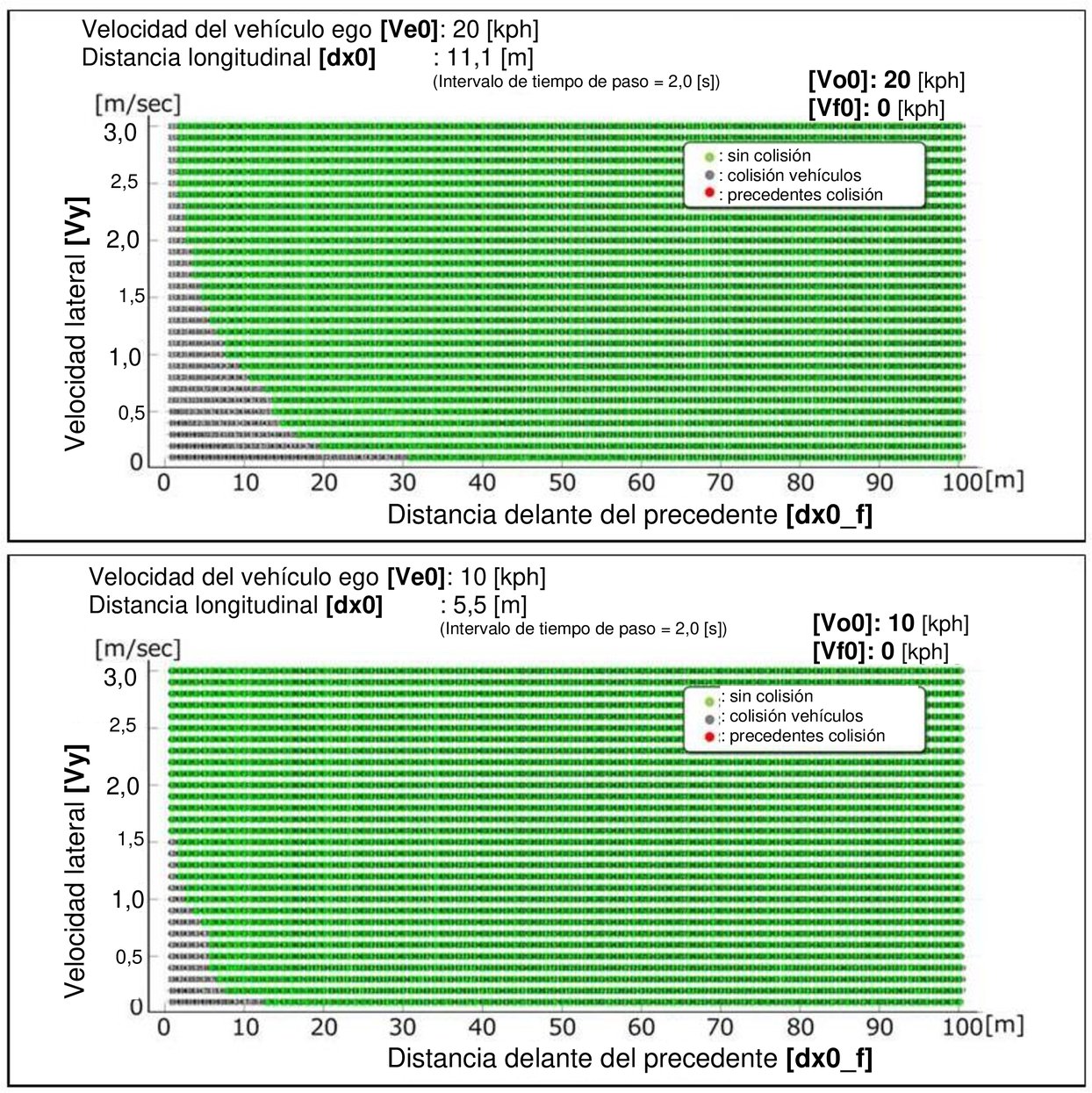
El sistema activado detectará la distancia hasta el vehículo que le precede como se define en el punto 7.1.1 y adaptará la velocidad del vehículo a fin de evitar una colisión.
Mientras el vehículo equipado con sistema automático de mantenimiento del carril no esté detenido, el sistema adaptará la velocidad para ajustar la distancia con respecto al vehículo que le preceda en el mismo carril para que sea igual o mayor que la distancia mínima de seguridad. En el caso de que temporalmente no se pueda respetar el intervalo mínimo de seguridad por causa de otros usuarios de la vía (por ejemplo, el vehículo se incorpora al carril, el vehículo precedente desacelera, etc.), el vehículo reajustará la distancia mínima de seguridad en la próxima oportunidad disponible sin frenar bruscamente, salvo que sea necesario realizar una maniobra de emergencia. La distancia mínima de seguridad se calculará por medio de la siguiente fórmula: dmin= vALKS* tfront Donde:
Con valores de velocidad no mencionados en el cuadro, se aplicará una interpolación lineal. Sin perjuicio del resultado de la fórmula anterior para velocidades actuales inferiores a 2 m/s, la distancia mínima de seguridad nunca será inferior a 2 m. |
|
5.2.4. |
El sistema activado podrá frenar el vehículo hasta que quede detenido por completo detrás de un vehículo estático, un usuario de la vía estático o un carril de circulación bloqueado para evitar una colisión. Esto deberá garantizarse hasta la velocidad máxima en servicio del sistema. |
|
5.2.5. |
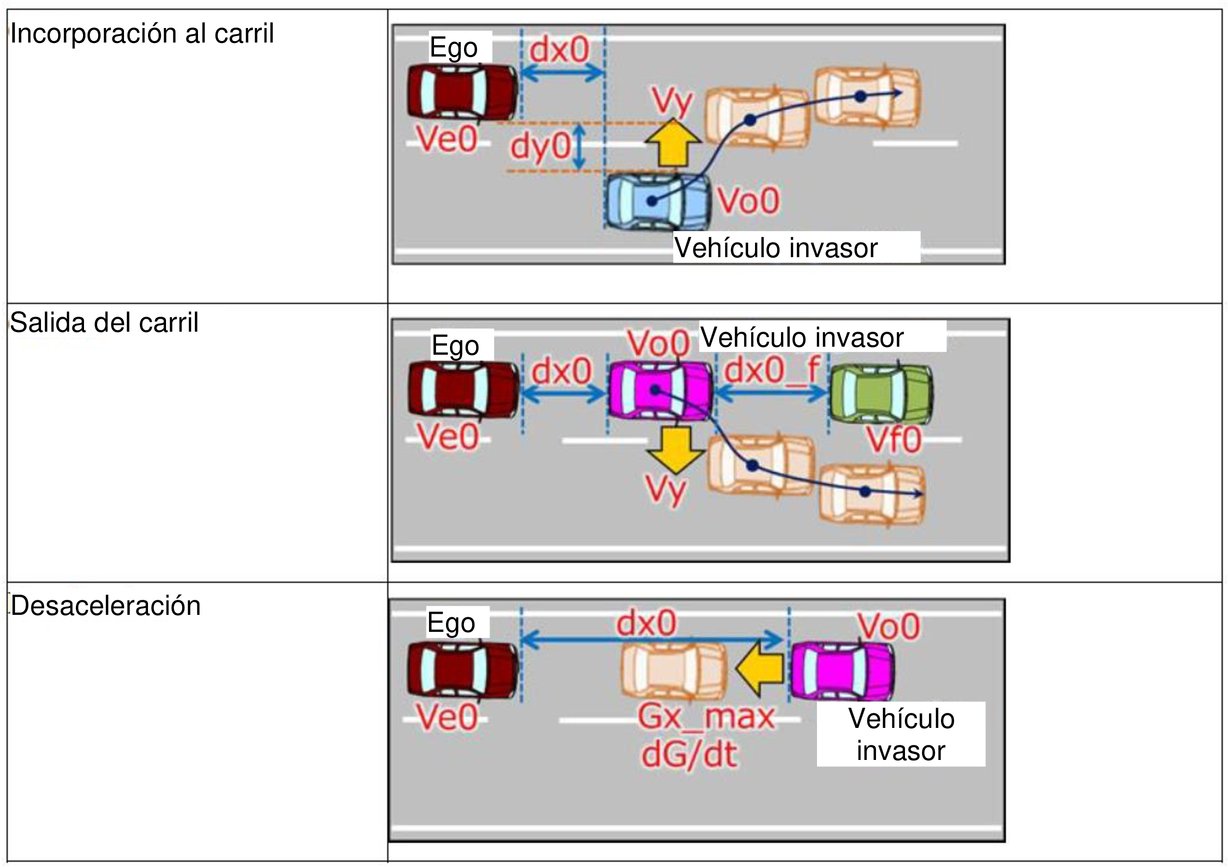
El sistema activado detectará el riesgo de colisión, en particular con otro usuario de la vía por delante o al lado del vehículo, debido a la desaceleración del vehículo precedente, a la incorporación de un vehículo al carril o la aparición repentina de un obstáculo y ejecutará automáticamente las maniobras adecuadas para minimizar los riesgos para la seguridad de los ocupantes del vehículo y otros usuarios de la vía.
En condiciones no especificadas en el punto 5.2.4 o en el punto 5.2.5 o sus partes, esto deberá garantizarse al menos hasta el nivel en que un conductor humano competente y cuidadoso pudiera minimizar los riesgos. Así deberá demostrarse en la evaluación realizada en virtud del anexo 4 y siguiendo las orientaciones del apéndice 3 al anexo 4. |
|
5.2.5.1. |
El sistema activado evitará una colisión con el vehículo precedente cuando este desacelere a su máximo rendimiento de frenado siempre que no haya reducción de la distancia mínima de seguridad; el vehículo equipado con sistema automático de mantenimiento del carril ajustará su separación del vehículo precedente a la velocidad actual debido a una maniobra de incorporación al carril de este vehículo precedente. |
|
5.2.5.2. |
El sistema activado evitará la colisión con un vehículo que efectúe una maniobra de incorporación al carril,
|
|
5.2.5.3. |
El sistema activado evitará una colisión con un peatón que cruce por delante del vehículo por un paso de peatones sin barreras.
En un escenario con un paso de peatones sin barreras con un componente de velocidad lateral no superior a 5 km/h, cuando el punto de impacto previsto se desplace un máximo de 0,2 m en comparación con el plano central longitudinal del vehículo, el sistema automático de mantenimiento del carril activado evitará una colisión a la velocidad máxima en servicio del sistema. |
|
5.2.5.4. |
Se reconoce que es posible que el requisito establecido en el punto 5.2.5 no se cumpla por entero en condiciones distintas de las descritas anteriormente. No obstante, en estas otras condiciones, el sistema no deberá desactivar o cambiar la estrategia de control de forma injustificada. Esto se demostrará con arreglo al anexo 4 del presente Reglamento. |
|
5.3. |
Maniobra de emergencia
El fabricante demostrará el cumplimiento de lo dispuesto en este punto, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 y conforme a los ensayos pertinentes del anexo 5. |
|
5.3.1. |
Se realizará una maniobra de emergencia cuando exista riesgo de colisión inminente. |
|
5.3.1.1. |
Cualquier demanda de desaceleración longitudinal de más de 5,0 m/s2 del sistema se considerará una maniobra de emergencia. |
|
5.3.2. |
Esta maniobra ocasionará la desaceleración del vehículo a su máximo rendimiento de frenado si es necesario o bien podrá realizar una maniobra evasiva automática, cuando proceda.
Si algún fallo afecta al rendimiento de frenado o dirección del sistema, la maniobra se realizará en consideración del rendimiento restante. Durante la maniobra evasiva, el vehículo equipado con sistema automático de mantenimiento del carril no traspasará la marca del carril (borde exterior del neumático delantero hasta el borde exterior de la marca del carril). Después de la maniobra evasiva, el vehículo tratará de recuperar una posición estable. |
|
5.3.3. |
Una maniobra de emergencia no terminará hasta que el riesgo de colisión inminente haya desaparecido o el conductor desactive el sistema. |
|
5.3.3.1. |
Una vez terminada la maniobra de emergencia, el sistema seguirá funcionando. |
|
5.3.3.2. |
Si la maniobra de emergencia finaliza con el vehículo detenido, se generará la señal de activar las luces de emergencia. Si el vehículo vuelve a ponerse en movimiento automáticamente, la señal de desactivar las luces de emergencia se generará automáticamente. |
|
5.3.4. |
El vehículo aplicará una señal lógica indicativa del frenado de emergencia conforme a lo especificado en el Reglamento n.o 13-H de las Naciones Unidas. |
|
5.4. |
Demanda de transición y funcionamiento del sistema durante la fase de transición
El fabricante deberá demostrar, a satisfacción del servicio técnico, que se cumplen las disposiciones de este punto durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 (en particular en relación con las condiciones no ensayadas en virtud del anexo 5) y con arreglo a los ensayos pertinentes establecidos en el anexo 5. |
|
5.4.1. |
El sistema activado reconocerá todas las situaciones en las que sea necesario devolver el control al conductor.
Los tipos de situaciones en las que el vehículo generará una demanda de transición al conductor serán declarados por el fabricante del vehículo e incluidos en la documentación establecida en el anexo 4. |
|
5.4.2. |
La demanda de transición se iniciará de tal manera que quede tiempo suficiente para una transición segura a la conducción manual. |
|
5.4.2.1. |
En el caso de un evento planificado que impida que el sistema automático de mantenimiento del carril siga funcionando, se efectuará una demanda de transición con tiempo suficiente para garantizar que la maniobra de riesgo mínimo, en el caso de que el conductor no retome el control, pueda detener el vehículo antes de que se produzca el evento planificado. |
|
5.4.2.2. |
En el caso de un evento no planificado, se efectuará la demanda de transición en el momento de la detección. |
|
5.4.2.3 |
En el caso de que un fallo afecte al funcionamiento del sistema, este iniciará una demanda de transición de forma inmediata en el momento de la detección. |
|
5.4.3. |
Durante la fase de transición, el sistema continuará funcionando. El sistema podrá reducir la velocidad del vehículo para garantizar la seguridad de su funcionamiento, pero no lo detendrá salvo que la situación lo requiera (por ejemplo, cuando haya algún vehículo u obstáculo en la trayectoria del vehículo) o cuando lo provoque un aviso háptico conforme al punto 6.4.1 iniciado a una velocidad inferior a 20 km/h. |
|
5.4.3.1. |
Una vez detenido, el vehículo podrá permanecer en este estado y generará la señal de activar las luces de emergencia en un intervalo de 5 s. |
|
5.4.3.2. |
Durante la fase de transición, la demanda de transición se propagará a más tardar al cabo de 4 s después de iniciarse. |
|
5.4.4. |
Una demanda de transición solo terminará una vez desactivado el sistema o iniciada una maniobra de riesgo mínimo. |
|
5.4.4.1. |
En el caso de que el conductor no responda a una demanda de transición desactivando el sistema (según lo descrito en el punto 6.2.4 o 6.2.5), se iniciará una maniobra de riesgo mínimo, al menos 10 s después de iniciarse la demanda de transición. |
|
5.4.4.1.1. |
Sin perjuicio de lo dispuesto en el punto 5.4.4.1, se podrá iniciar una maniobra de riesgo mínimo de forma inmediata en caso de fallo grave del sistema automático de mantenimiento del carril o del vehículo.
En el caso de un fallo grave del sistema automático de mantenimiento del carril o del vehículo, puede que este sistema ya no sea capaz de cumplir los requisitos del presente Reglamento, pero tratará de habilitar una transición segura a la recuperación del control por parte del conductor. |
|
5.4.4.1.2. |
El fabricante deberá declarar los tipos de fallos graves del vehículo o del sistema automático de mantenimiento del carril que harán que dicho sistema inicie una maniobra de riesgo mínimo de forma inmediata. |
|
5.5. |
Maniobra de riesgo mínimo
El fabricante deberá demostrar, a satisfacción del servicio técnico, que se cumplen las disposiciones de este punto durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 (en particular en relación con las condiciones no ensayadas en virtud del anexo 5) y con arreglo a los ensayos pertinentes establecidos en el anexo 5. |
|
5.5.1. |
Durante la maniobra de riesgo mínimo, el vehículo disminuirá su velocidad dentro del carril o bien, en el caso de que las marcas del carril no sean visibles, permanecerá en una trayectoria apropiada teniendo en cuenta el tráfico de alrededor y la infraestructura vial, con el fin de alcanzar una demanda de desaceleración no superior a 4,0 m/s2.
Son admisibles valores de demanda de desaceleración superiores durante intervalos muy cortos, por ejemplo, a modo de aviso háptico para estimular la atención del conductor, o en caso de fallo grave del sistema automático de mantenimiento del carril o del vehículo. Además, la señal de activar las luces de emergencia se generará al iniciar la maniobra de riesgo mínimo. |
|
5.5.2. |
La maniobra de riesgo mínimo hará que el vehículo se detenga a menos que el sistema sea desactivado por el conductor durante la maniobra. |
|
5.5.3. |
Una maniobra de riesgo mínimo solo terminará cuando el sistema se desactive o cuando el sistema haya detenido el vehículo. |
|
5.5.4. |
El sistema se desactivará al final de la maniobra de riesgo mínimo.
Las luces de emergencia permanecerán activadas hasta que sean desactivadas manualmente y el vehículo no se pondrá en movimiento una vez detenido si no es por acción manual. |
|
5.5.5. |
Solo será posible reactivar el sistema al finalizar una maniobra de riesgo mínimo después de cada nuevo ciclo de encendido/marcha del motor. |
6. INTERFAZ PERSONA-MÁQUINA/INFORMACIÓN PARA EL OPERADOR
|
6.1. |
Sistema de reconocimiento de la disponibilidad del conductor
El fabricante demostrará el cumplimiento de lo dispuesto en este punto, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 y conforme a los ensayos pertinentes del anexo 5. |
|
6.1.1. |
El sistema incluirá un sistema de reconocimiento de la disponibilidad del conductor.
El sistema de reconocimiento de la disponibilidad del conductor detectará si el conductor está presente en la posición de conducción, si lleva el cinturón de seguridad abrochado y si está disponible para asumir la tarea de conducción. |
|
6.1.2. |
Presencia del conductor
Se iniciará una demanda de transición conforme al punto 5.4 si se cumple alguna de las siguientes condiciones:
En lugar de un aviso acústico de la demanda de transición podrá utilizarse el aviso de segundo nivel de recordatorio del cinturón de seguridad conforme al Reglamento n.o 16 de las Naciones Unidas. |
|
6.1.3. |
Disponibilidad del conductor
El sistema detectará si el conductor está disponible y en una posición de conducción adecuada para responder a una demanda de transición monitorizando al conductor. El fabricante demostrará, a satisfacción del servicio técnico, la capacidad del vehículo de detectar que el conductor está disponible para hacerse cargo de la tarea de conducción. |
|
6.1.3.1. |
Criterios para considerar la disponibilidad del conductor
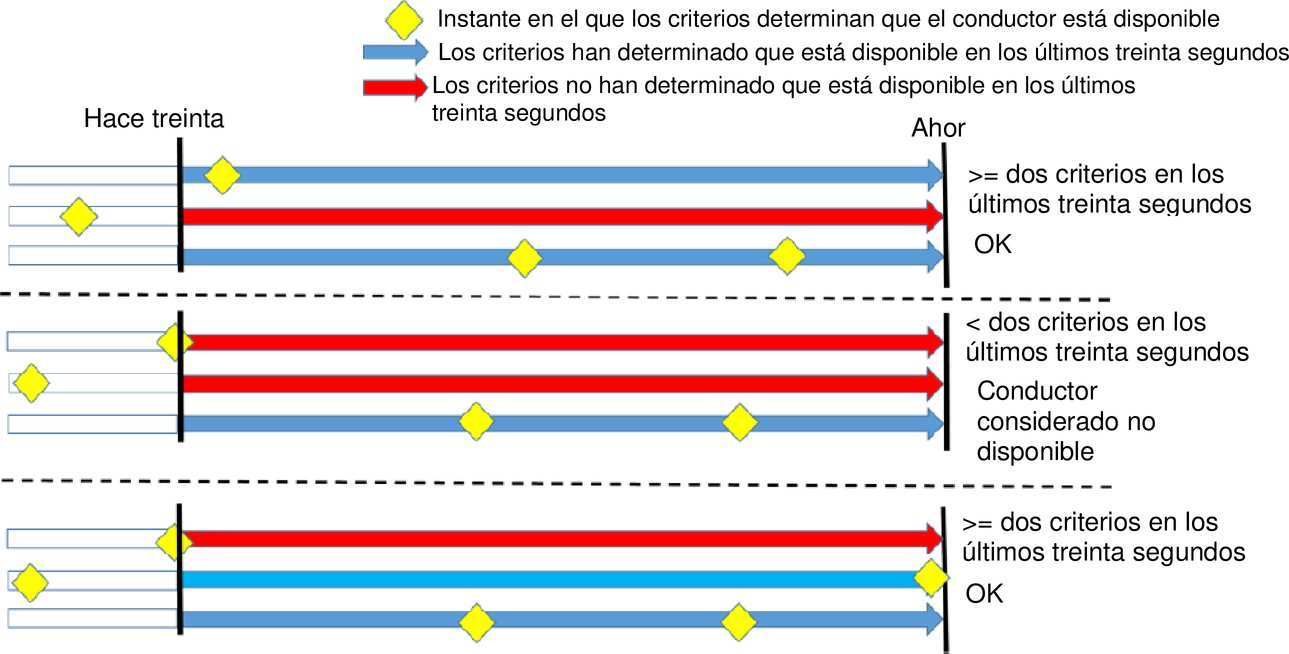
Se considerará que el conductor no está disponible salvo que al menos dos criterios de disponibilidad (por ejemplo, accionamiento del control del vehículo exclusivo del conductor, parpadeo, párpados cerrados, cabeza consciente o movimiento corporal) hayan determinado de forma individual que el conductor está disponible en los últimos treinta segundos. En cualquier momento, el sistema puede considerar que el conductor no está disponible. En cuanto se considere que el conductor no está disponible, o se puedan monitorizar menos de dos criterios de disponibilidad, el sistema emitirá de inmediato un aviso distintivo hasta que se detecten las acciones apropiadas del conductor o hasta que se inicie una demanda de transición. A más tardar, se iniciará una demanda de transición conforme al punto 5.4 si este aviso continúa durante quince segundos. El fabricante aportará pruebas documentales que justifiquen el número y combinación de criterios de disponibilidad, en particular con respecto al intervalo de tiempo correspondiente. Sin embargo, el intervalo de tiempo requerido para cualquier criterio de disponibilidad no excederá de treinta segundos. Esto deberá ser demostrado por el fabricante y evaluado por el servicio técnico con arreglo al anexo 4.
|
|
6.1.4. |
«Cualquier actividad que no sea conducir» a través de indicadores de a bordo disponibles tras la activación del sistema automático de mantenimiento del carril quedará suspendida automáticamente i) en el momento en que el sistema emita una demanda de transición o ii) en el momento en que el sistema se desactive, lo que ocurra primero. |
|
6.2. |
Activación, desactivación y acción del conductor
El fabricante demostrará el cumplimiento de lo dispuesto en este punto, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 y conforme a los ensayos pertinentes del anexo 5. |
|
6.2.1. |
El vehículo estará provisto de un medio específico para que el conductor active (modo activo) y desactive (modo apagado) el sistema. Cuando el sistema automático de mantenimiento del carril esté activado, el medio para desactivarlo permanecerá en todo momento visible para el conductor. |
|
6.2.2. |
Por defecto, el sistema estará en el modo apagado al iniciarse cada nuevo ciclo de encendido/marcha del motor.
Este requisito no se aplicará cuando se inicie automáticamente un nuevo ciclo de encendido/marcha del motor, por ejemplo, al accionar un sistema de parada y arranque. |
|
6.2.3. |
El sistema solo se activará por una acción deliberada del conductor y siempre que se cumplan todas las condiciones siguientes:
Si se deja de cumplir alguna de estas condiciones, el sistema iniciará inmediatamente una demanda de transición, salvo que el presente Reglamento establezca otra cosa. |
|
6.2.4 |
El conductor podrá desactivar el sistema manualmente (modo apagado) accionando deliberadamente los mismos medios utilizados para activar el sistema, como se indica en el punto 6.2.1.
Los medios de desactivación incluirán protección contra la desactivación manual no intencionada, por ejemplo, la necesidad de efectuar una sola acción que sobrepase un umbral de tiempo determinado, o una doble pulsación, o dos acciones separadas pero simultáneas. Además, se garantizará que el conductor mantenga el control lateral del vehículo en el momento de la desactivación, por ejemplo, mediante la colocación del medio de desactivación en el mando de dirección o la confirmación de que el conductor está sujetando el mando de dirección. |
|
6.2.5. |
Además del punto 6.2.4, el sistema no se desactivará por ninguna acción del conductor distinta de las descritas en los puntos 6.2.5.1 hasta 6.2.5.4. |
|
6.2.5.1. |
Desactivación por accionamiento de los controles de conducción
El sistema se desactivará cuando se cumpla al menos una de las condiciones siguientes:
|
|
6.2.5.2. |
Desactivación durante una demanda de transición en curso o durante una maniobra de riesgo mínimo en curso
En el caso de que haya una demanda de transición o una maniobra de riesgo mínimo en curso, el sistema solo se desactivará:
|
|
6.2.5.3. |
Desactivación durante una maniobra de emergencia en curso
En el caso de que haya una maniobra de emergencia en curso, se podrá retrasar la desactivación del sistema hasta que desaparezca el riesgo de colisión inminente. |
|
6.2.5.4. |
Desactivación en caso de fallo grave del vehículo o del sistema automático de mantenimiento del carril
En caso de fallo grave del vehículo o del sistema automático de mantenimiento del carril, este podrá emplear diferentes estrategias de desactivación. El fabricante deberá declarar estas estrategias diferentes y el servicio técnico evaluará su eficacia para garantizar una transición segura del control del sistema al conductor humano con arreglo al anexo 4. |
|
6.2.6. |
Al desactivarse el sistema, no se producirá una transición automática a ninguna función que proporcione un movimiento longitudinal o lateral continuo del vehículo (por ejemplo, FDAA de categoría B1).
Tras la desactivación, la función correctora de la dirección (FCD) podrá estar activa con el fin de acostumbrar al conductor a ejecutar la tarea de control lateral reduciendo gradualmente la asistencia lateral. Sin perjuicio de lo dispuesto en los dos párrafos anteriores, en caso de desactivación del sistema automático de mantenimiento del carril, no se desactivará ningún otro sistema de seguridad que proporcione asistencia longitudinal o lateral en situaciones de colisión inminente [por ejemplo, sistema avanzado de frenado de emergencia (AEBS), control electrónico de la estabilidad (CEE), sistema de asistencia en el frenado (BAS) o función de dirección de emergencia (FDE)]. |
|
6.2.7. |
Toda desactivación se indicará al conductor con arreglo a lo establecido en el punto 6.4.2.3. |
|
6.3. |
Anulación del sistema |
|
6.3.1. |
El accionamiento del mando de dirección por parte del conductor anulará la función de control lateral del sistema cuando la acción realizada sobrepase un umbral razonable diseñado para evitar una anulación no intencionada.
Este umbral incluirá una fuerza y una duración especificadas y variará en función de parámetros que incluyen los criterios utilizados para comprobar la atención del conductor durante la acción del conductor conforme a lo establecido en el punto 6.3.1.1. Estos umbrales y la justificación de cualquier variación deberán demostrarse a satisfacción del servicio técnico durante la evaluación conforme a lo dispuesto en el anexo 4. |
|
6.3.1.1. |
Atención del conductor
El sistema detectará si el conductor está atento. Se considera que el conductor está atento si se cumple al menos uno de los criterios siguientes:
El fabricante deberá declarar las especificaciones que confirmen estos criterios u otros igualmente seguros, justificados con pruebas documentales. El servicio técnico procederá a su evaluación conforme a lo establecido en el anexo 4. |
|
6.3.2. |
La función de control longitudinal del sistema se anulará cuando el conductor accione el control de frenado de manera que se produzca una desaceleración mayor de la inducida por el sistema o se mantenga el vehículo detenido por la acción de cualquier sistema de frenado. |
|
6.3.3. |
La función de control longitudinal del sistema puede anularse cuando el conductor acciona el control del acelerador. Sin embargo, dicha acción no hará que el sistema deje de cumplir los requisitos del presente Reglamento. |
|
6.3.4. |
Cuando el conductor accione el control del acelerador o del freno, se iniciará de inmediato una demanda de transición conforme a lo establecido en el punto 5.4, cuando la acción sobrepase un umbral razonable diseñado para evitar accionamientos no intencionados. |
|
6.3.5. |
Sin perjuicio de lo dispuesto en los puntos 6.3.1 a 6.3.3, el sistema puede reducir o suprimir el efecto del accionamiento de cualquier control por el conductor en el caso de que el sistema detecte un riesgo de colisión inminente debido a esta acción del conductor. |
|
6.3.6. |
En caso de fallo grave del vehículo o del sistema automático de mantenimiento del carril, este podrá emplear diferentes estrategias para anular el sistema. El fabricante deberá declarar estas estrategias diferentes y el servicio técnico evaluará su eficacia para garantizar una transición segura del control del sistema al conductor humano. |
|
6.3.7. |
El fabricante demostrará el cumplimiento de lo dispuesto en el punto 6.3 y sus partes, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4. |
|
6.4. |
Información para el conductor |
|
6.4.1. |
Se indicará la siguiente información al conductor:
Las señales ópticas mencionadas serán de tamaño y contraste adecuados. Las señales acústicas mencionadas sonarán altas y claras. |
|
6.4.2. |
Estado del sistema |
|
6.4.2.1. |
Indicación de falta de disponibilidad del sistema
En el caso de que el sistema deniegue la activación del sistema tras la acción deliberada del conductor por falta de disponibilidad del sistema, esto se indicará al conductor al menos por medios visuales. |
|
6.4.2.2. |
Indicación visual de estado del sistema tras la activación
Tras la activación, se indicará visualmente el estado del sistema (modo activo) al conductor por medio de una señal óptica específica. Esta señal óptica contendrá una indicación inequívoca que incluya:
La señal óptica indicará que el sistema está activo hasta que este se desactive (modo apagado). La señal óptica será fija mientras el sistema permanezca en funcionamiento normal y, al iniciarse una demanda de transición, al menos la indicación conforme a la letra b) modificará sus características, por ejemplo, pasará a ser intermitente o cambiará de color. Cuando se utilice una señal intermitente, se utilizará una frecuencia baja para no alertar al conductor de manera injustificada. Durante la fase de transición y la maniobra de riesgo mínimo, la indicación conforme a la letra a) podrá ser sustituida por la instrucción de asumir el control manual conforme al punto 6.4.3. |
|
6.4.2.3. |
Indicación visual de estado del sistema tras la desactivación
Tras la desactivación, cuando el estado del sistema pase de modo activo a modo apagado, esto se indicará al conductor al menos por medio de una señal de aviso óptica. Dicha señal óptica consistirá en no mostrar la señal óptica utilizada para indicar el modo activo o no mostrar la instrucción de asumir el control manual. Además, se emitirá una señal de aviso acústica, salvo que el sistema se desactive a raíz de una demanda de transición que incluya una señal acústica. |
|
6.4.3. |
Fase de transición y maniobra de riesgo mínimo
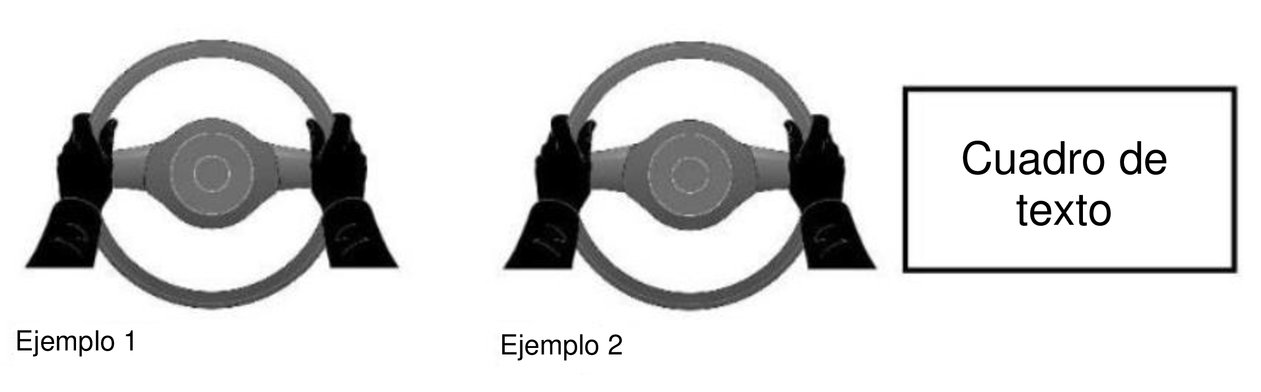
Durante la fase de transición y la maniobra de riesgo mínimo, el sistema comunicará al conductor, de forma intuitiva e inequívoca, la instrucción de que asuma el control manual del vehículo. Dicha instrucción incluirá información gráfica que muestre las manos y el mando de dirección y podrá ir acompañada de texto explicativo adicional o símbolos de aviso, como se indica en el ejemplo siguiente.
|
|
6.4.3.2. |
Al iniciarse la maniobra de riesgo mínimo, la señal emitida modificará sus características para resaltar la urgencia de que el conductor actúe, por ejemplo, con el parpadeo en rojo del mando de dirección y las manos en movimiento que se muestran en la información gráfica. |
|
6.4.4. |
En los casos en que se ofrecen ejemplos en los puntos anteriores, podrían utilizarse en su lugar señales ópticas diseñadas con una interfaz adecuada e igualmente perceptible. El fabricante deberá demostrarlo y justificarlo con pruebas documentales. El servicio técnico procederá a su evaluación conforme a lo establecido en el anexo 4. |
|
6.4.5. |
Priorización de los avisos del sistema automático de mantenimiento del carril
Los avisos de un sistema automático de mantenimiento del carril durante una fase de transición, una maniobra de riesgo mínimo o una maniobra de emergencia pueden tener prioridad sobre otros avisos del vehículo. Durante el proceso de homologación de tipo, el fabricante deberá declarar al servicio técnico la priorización de diferentes avisos acústicos y ópticos durante el funcionamiento del sistema automático de mantenimiento del carril. |
7. DETECCIÓN DE OBJETOS Y EVENTOS, Y RESPUESTA
|
7.1. |
Requisitos de detección
El fabricante demostrará el cumplimiento de lo dispuesto en este punto, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4 y conforme a los ensayos pertinentes del anexo 5. El vehículo equipado con sistema automático de mantenimiento del carril estará provisto de un sistema de detección tal que pueda al menos determinar el entorno de conducción (por ejemplo, la geometría de la vía o las marcas de carril) y la dinámica del tráfico:
Los requisitos de este punto son de aplicación sin perjuicio de otros requisitos del presente Reglamento, más concretamente el punto 5.1.1. |
|
7.1.1. |
Alcance de detección delantero
El fabricante deberá declarar el alcance de detección delantero medido desde el punto más avanzado del vehículo. Este valor declarado será como mínimo de cuarenta y seis metros. El servicio técnico verificará que la distancia a la que el sistema de detección del vehículo detecte a un usuario de la vía durante el ensayo pertinente del anexo 5 sea igual o superior al valor declarado. |
|
7.1.2. |
Alcance de detección lateral
El fabricante deberá declarar el alcance de detección lateral. El alcance declarado será suficiente para abarcar toda la anchura del carril situado inmediatamente a la izquierda y del carril situado inmediatamente a la derecha del vehículo. El servicio técnico verificará que el sistema de detección del vehículo detecte vehículos durante el ensayo pertinente del anexo 5. Este alcance será igual o superior al alcance declarado. |
|
7.1.3. |
El sistema automático de mantenimiento del carril aplicará estrategias de detección y compensación de circunstancias ambientales que reduzcan el alcance de detección, por ejemplo, impedir que se habilite el sistema, deshabilitar el sistema y devolver el control al conductor, o reducir la velocidad cuando haya muy poca visibilidad. Estas estrategias serán descritas por el fabricante y evaluadas conforme al anexo 4. |
|
7.1.4. |
El fabricante del vehículo aportará pruebas de que los efectos del desgaste y el envejecimiento no reducen el rendimiento del sistema de detección por debajo del valor mínimo requerido especificado en el punto 7.1 durante toda la vida útil del sistema/vehículo. |
|
7.1.5. |
Deberá demostrarse, a satisfacción del servicio técnico, que se cumplen las disposiciones del punto 7.1 y sus partes, y probarse con arreglo a los ensayos pertinentes del anexo 5. |
|
7.1.6. |
Una simple percepción de mal funcionamiento sin fallo no debe inducir un evento peligroso. El fabricante del vehículo deberá describir las estrategias de diseño aplicadas y demostrar su seguridad a satisfacción del servicio técnico con arreglo a lo establecido en el anexo 4. |
8. SISTEMA DE ALMACENAMIENTO DE DATOS PARA CONDUCCIÓN AUTÓNOMA
|
8.1. |
Cada vehículo equipado con sistema automático de mantenimiento del carril (el sistema) incorporará un sistema de almacenamiento de datos para la conducción autónoma que cumpla los requisitos que se especifican a continuación. El fabricante demostrará el cumplimiento de lo dispuesto en el apartado 8, a satisfacción del servicio técnico, durante la inspección del enfoque de la seguridad como parte de la evaluación conforme al anexo 4.
Este Reglamento se aplica sin perjuicio de la legislación nacional y regional que regula el acceso a los datos, la privacidad y la protección de datos. |
|
8.2. |
Incidencias registradas |
|
8.2.1. |
Cada vehículo equipado con un sistema de almacenamiento de datos para la conducción autónoma registrará al menos una entrada por cada una de las siguientes incidencias tras la activación del sistema:
|
|
8.3. |
Elementos de datos |
|
8.3.1. |
Por cada uno de los eventos enumerados en el punto 8.2, el sistema de almacenamiento de datos para la conducción autónoma registrará al menos los siguientes elementos de datos de manera que sean claramente identificables:
|
|
8.3.2. |
Por cada uno de los eventos enumerados en el punto 8.2, se podrá identificar con claridad el número R157SWIN del sistema automático de mantenimiento del carril, o las versiones de software pertinentes para el sistema, con indicación de que el software estaba presente en el momento de producirse el evento. |
|
8.3.3. |
Se admitirá un único sello de tiempo para varios elementos registrados simultáneamente en la resolución temporal de los elementos de datos específicos. Si se registra más de un elemento con el mismo sello de tiempo, la información de cada elemento indicará el orden cronológico. |
|
8.4. |
Disponibilidad de los datos |
|
8.4.1. |
Los datos del sistema de almacenamiento de datos para la conducción autónoma deberán estar disponibles con arreglo a los requisitos de la legislación nacional y regional (3). |
|
8.4.2. |
Una vez que se alcancen los límites de almacenamiento del sistema de almacenamiento de datos para la conducción autónoma, solo se sobrescribirán los datos existentes siguiendo el procedimiento «primero en entrar, primero en salir», con el principio de respetar los requisitos pertinentes de disponibilidad de los datos.
El fabricante del vehículo demostrará la capacidad de almacenamiento documentalmente. |
|
8.4.3. |
Los datos se podrán recuperar incluso después de un impacto del nivel de gravedad establecido por los Reglamentos n.o 94, n.o 95 o n.o 137 de las Naciones Unidas. Si la principal fuente de alimentación de a bordo no está disponible, todavía será posible recuperar todos los datos registrados en el sistema de almacenamiento de datos para la conducción autónoma, según lo establecido en la legislación nacional y regional. |
|
8.4.4. |
Los datos almacenados en el sistema de almacenamiento de datos para la conducción autónoma se podrán leer fácilmente por un método normalizado mediante el uso de una interfaz electrónica de comunicación, al menos a través de la interfaz estándar (puerto DAB). |
|
8.4.5. |
Se facilitarán las instrucciones del fabricante sobre el modo de acceder a los datos. |
|
8.5. |
Protección contra manipulaciones. |
|
8.5.1. |
Se garantizará una protección adecuada contra la manipulación indebida (por ejemplo, el borrado) de los datos almacenados. |
|
8.6. |
Disponibilidad del funcionamiento del sistema de almacenamiento de datos para la conducción autónoma |
|
8.6.1. |
El sistema de almacenamiento de datos para la conducción autónoma podrá comunicarse con el sistema para informar que el sistema de almacenamiento de datos para la conducción autónoma está operativo. |
9. CIBERSEGURIDAD Y ACTUALIZACIONES DE SOFTWARE
|
9.1. |
La eficacia del sistema no deberá verse mermada a causa de ciberataques, ciberamenazas y vulnerabilidades. La eficacia de las medidas de seguridad deberá demostrarse mediante el cumplimiento del Reglamento n.o 155 de las Naciones Unidas. |
|
9.2. |
Si el sistema permite actualizaciones de software, la eficacia de los procedimientos y procesos de actualización de software deberá demostrarse mediante el cumplimiento del Reglamento n.o 156 de las Naciones Unidas. |
|
9.3. |
Requisitos de identificación de software |
|
9.3.1. |
Para garantizar que se pueda identificar el software del sistema, el fabricante del vehículo podrá aplicar un número R157SWIN. Si no se aplica el número R157SWIN, se aplicará un sistema alternativo de identificación de software (es decir, la versión del software). |
|
9.3.2. |
Si el fabricante aplica un número R157WIN, se aplicará lo siguiente: |
|
9.3.2.1. |
El fabricante del vehículo estará en posesión de una homologación válida conforme al Reglamento n.o 156 de las Naciones Unidas (Reglamento de actualización de software). |
|
9.3.2.2. |
El fabricante del vehículo proporcionará la siguiente información en el formulario de comunicación de este Reglamento:
|
|
9.3.2.3. |
El fabricante del vehículo podrá incluir en el formulario de comunicación de este Reglamento una lista de los parámetros pertinentes que permitirán la identificación de aquellos vehículos que puedan actualizarse con el software representado por el número R157SWIN. La información facilitada será declarada por el fabricante del vehículo y no podrá ser verificada por una autoridad de homologación. |
|
9.3.3. |
El fabricante del vehículo podrá obtener una nueva homologación del vehículo con el fin de diferenciar las versiones de software que se pretendan usar en vehículos ya matriculados en el mercado de las versiones de software que se utilicen en vehículos nuevos. Esto puede cubrir situaciones en que se actualicen las normas de homologación de tipo o se realicen cambios de hardware en los vehículos de producción en serie. De acuerdo con la agencia responsable de los ensayos, se evitará la duplicación de ensayos en la medida de lo posible. |
10. MODIFICACIÓN DEL TIPO DE VEHÍCULO Y EXTENSIÓN DE LA HOMOLOGACIÓN DE TIPO
|
10.1. |
Toda modificación de un tipo de vehículo existente deberá notificarse a la autoridad de homologación de tipo que lo haya homologado.
Dicha autoridad deberá entonces:
|
|
10.1.1. |
Revisión
Cuando hayan cambiado los datos registrados en las fichas de características y la autoridad de homologación de tipo considere improbable que las modificaciones realizadas tengan consecuencias negativas apreciables y que, en cualquier caso, los mandos que se accionan con el pie siguen cumpliendo los requisitos correspondientes, la modificación será considerada una «revisión». En estos casos, la autoridad de homologación de tipo deberá expedir las páginas revisadas de las fichas de características, según proceda, señalando claramente en cada página revisada qué tipo de cambio se ha producido y en qué fecha tuvo lugar la nueva expedición. Se considerará cumplido este requisito mediante una copia consolidada y actualizada de las fichas de características que lleve adjunta una descripción detallada de los cambios. |
|
10.1.2. |
Extensión
La modificación se considerará una «extensión» si, además de la modificación de los datos registrados en las fichas de características:
|
|
10.2. |
La confirmación o denegación de la homologación se comunicará a las Partes contratantes del Acuerdo que apliquen el presente Reglamento, especificando la modificación, mediante el procedimiento indicado en el punto 4.3. Por otra parte, se modificará en consecuencia el índice de la ficha de características y de las actas de ensayo, que se adjunta a la ficha de características del anexo 1, para mostrar la fecha de la revisión o extensión más reciente. |
|
10.3. |
La autoridad competente que expida la extensión de la homologación asignará un número de serie a cada formulario de comunicación cumplimentado para dicha extensión. |
11. CONFORMIDAD DE LA PRODUCCIÓN
|
11.1. |
Los procedimientos relativos a la conformidad de la producción deberán ajustarse a los expuestos en el anexo 1 del Acuerdo de 1958 (E/ECE/TRANS/505/Rev.3) y cumplir los requisitos siguientes: |
|
11.2. |
Todo vehículo homologado con arreglo al presente Reglamento estará fabricado de manera que sea conforme al tipo homologado mediante el cumplimiento de los requisitos del presente Reglamento. |
|
11.3. |
La autoridad de homologación de tipo que haya concedido la homologación podrá verificar en todo momento la conformidad de los métodos de control aplicables a cada unidad de producción. La frecuencia normal de dichas inspecciones será de una vez cada dos años. |
12. SANCIONES POR FALTA DE CONFORMIDAD DE LA PRODUCCIÓN
|
12.1. |
Podrá retirarse la homologación concedida con respecto a un tipo de vehículo con arreglo al presente Reglamento si no se cumplen los requisitos establecidos en el apartado 8. |
|
12.2. |
Cuando una Parte contratante retire una homologación que haya concedido previamente, informará de ello de forma inmediata a las demás Partes contratantes que apliquen el presente Reglamento mediante el envío de un formulario de comunicación conforme al modelo que figura en el anexo 1 del presente Reglamento. |
13. CESE DEFINITIVO DE LA PRODUCCIÓN
|
13.1. |
Cuando el titular de una homologación cese definitivamente la fabricación de un tipo de vehículo homologado con arreglo al presente Reglamento, informará de ello a la autoridad de homologación de tipo que haya concedido la homologación, la cual, a su vez, informará inmediatamente a las demás Partes Contratantes del Acuerdo que apliquen el presente Reglamento mediante un formulario de comunicación conforme con el modelo del anexo 1. |
|
13.2. |
No se considerará que se ha producido el cese definitivo de la producción si el fabricante del vehículo tiene intención de obtener homologaciones adicionales de actualizaciones de software para vehículos ya matriculados en el mercado. |
14. NOMBRES Y DIRECCIONES DE LOS SERVICIOS TÉCNICOS RESPONSABLES DE LA REALIZACIÓN DE LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes contratantes del Acuerdo que apliquen el presente Reglamento comunicarán a la Secretaría de las Naciones Unidas (4) el nombre y la dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo que concedan la homologación y a las cuales deban remitirse los formularios que certifiquen la concesión, la extensión, la denegación o la retirada de la homologación.
(1) Con arreglo a la definición que figura en la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6, apartado 2 www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Los números distintivos de las Partes Contratantes del Acuerdo de 1958 figuran en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 6: www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(3) Nota: de acuerdo con un reciente estudio cuantitativo de una Parte contratante, el GRVA está considerando la posibilidad de que el texto establezca varias especificaciones de 2 500 sellos de tiempo que se correspondan con un período de seis meses de uso.
(4) A través de la plataforma en línea («/343 Application») facilitada por la CEPE y dedicada al intercambio de tal información: https://www.unece.org/trans/main/wp29/datasharing.html
(Formato máximo: A4 (210 × 297 mm)
|
|
expedida por |
nombre de la administración: … … … |
|
relativa a (2): |
la concesión de la homologación la extensión de la homologación la denegación de la homologación la retirada de la homologación el cese definitivo de la producción |
de un tipo de vehículo por lo que respecta al sistema automático de mantenimiento del carril con arreglo al Reglamento n.o 157 de las Naciones Unidas
N.o de homologación …
Motivo de la extensión o revisión: …
1.
Denominación comercial o marca del vehículo …
2.
Tipo de vehículo …
3.
Nombre y dirección del fabricante …
4.
En su caso, nombre y dirección del representante del fabricante …
5.
Características generales de fabricación del vehículo
5.1.
Fotografías o esquemas de un vehículo representativo …
6.
Descripción o esquema del sistema automático de mantenimiento del carril, que incluya:
6.1.
Velocidad máxima especificada del sistema automático de mantenimiento del carril declarada por el fabricante …
6.2
Sistema de detección (incluidos sus componentes) …
6.3.
Instalación del sistema de detección del sistema automático de mantenimiento del carril …
6.4.
Identificación de software del sistema automático de mantenimiento del carril (en su caso) …
7.
Descripción escrita o esquema de la interfaz persona-máquina del sistema automático de mantenimiento del carril, que incluya:
7.1.
Métodos para detectar la disponibilidad del conductor …
7.2.
Medios para activar, desactivar y anular el sistema …
7.3.
Métodos para determinar la atención del conductor …
7.4.
Cualquier limitación del sistema ocasionada por condiciones ambientales o de la vía…
8.
Descripción escrita o esquema de la información facilitada al conductor, que incluya:
8.1.
Estado del sistema …
8.2.
Demanda de transición …
8.3.
Maniobra de riesgo mínimo …
8.4.
Maniobra de emergencia …
9.
Sistema de almacenamiento de datos para conducción autónoma (sistema de almacenamiento de datos para la conducción autónoma)
9.1.
Rendimiento del sistema de almacenamiento de datos para la conducción autónoma verificado tras los ensayos realizados conforme al anexo 5: …sí/no
9.2.
Verificada la documentación del sistema de almacenamiento de datos para la conducción autónoma relativa a la posibilidad de recuperar los datos, la autocomprobación de integridad de los datos y la protección contra la manipulación de los datos almacenados: sí/no
10.
Ciberseguridad y actualizaciones de software
10.1.
…Número de homologación de tipo de ciberseguridad (en su caso)
10.2.
Número de homologación de tipo de la actualización de software (en su caso) …
11.
Requisitos especiales aplicables a los aspectos relativos a la seguridad de los sistemas electrónicos de control (anexo 4)
11.1.
Referencia documental del fabricante para el anexo 4 (incluido el número de versión) …
11.2.
Formulario del documento de información (apéndice 2 del anexo 4) …
12.
Servicio técnico responsable de realizar los ensayos de homologación…
12.1.
Fecha del informe de ensayo expedido por dicho servicio…
12.2.
Número (de referencia) del informe expedido por dicho servicio…
13.
Homologación concedida/extendida/denegada/retirada2
14.
Ubicación de la marca de homologación en el vehículo…
15.
Lugar…
16.
Fecha…
17.
Firma…
18.
Se adjunta a la presente comunicación una lista de los documentos que figuran en el expediente de homologación depositado en el servicio administrativo que ha expedido la homologación y que pueden obtenerse previa petición
Información adicional
19.
Número R157SWIN: …
19.1.
Información sobre el procedimiento de lectura del número R157SWIN o de las versiones del software en el caso de que el número R157SWIN no se guarde en el vehículo …
19.2.
En su caso, deberán enumerarse los parámetros pertinentes que permitan la identificación de aquellos vehículos que puedan actualizarse con el software representado por el número R157SWIN previsto en el punto 19.1 …
(1) Número distintivo del país que ha concedido/extendido/denegado/retirado la homologación (véanse las disposiciones del Reglamento n.o 157 de las Naciones Unidas relativas a la homologación).
(2) Táchese lo que no proceda.
Apéndice
Apéndice a la Comunicación de la homologación de tipo n.o… en relación con la homologación de un tipo de vehículo por lo que respecta al sistema automático de mantenimiento del carril en virtud del Reglamento n.o 157
Información adicional
Regiones de la Parte contratantes donde el fabricante del vehículo ha declarado que se había evaluado que el sistema automático de mantenimiento del carril cumple con la normativa de tráfico local:
|
País |
Evaluado |
Comentarios sobre cualquier restricción |
|
E 1 Alemania |
Sí/No |
|
|
E 2 Francia |
|
|
|
E 3 Italia |
|
|
|
E 4 Países Bajos |
|
|
|
E 5 Suecia |
|
|
|
E 6 Bélgica |
|
|
|
E 7 Hungría |
|
|
|
E 8 Chequia |
|
|
|
E 9 España |
|
|
|
E 10 Serbia |
|
|
|
E 11 Reino Unido |
|
|
|
E 12 Austria |
|
|
|
E 13 Luxemburgo |
|
|
|
E 14 Suiza |
|
|
|
E 16 Noruega |
|
|
|
E 17 Finlandia |
|
|
|
E 18 Dinamarca |
|
|
|
E 19 Rumanía |
|
|
|
E 20 Polonia |
|
|
|
E 21 Portugal |
|
|
|
E 22 Federación de Rusia |
|
|
|
E 23 Grecia |
|
|
|
E 24 Irlanda |
|
|
|
E 25 Croacia |
|
|
|
E 26 Eslovenia |
|
|
|
E 27 Eslovaquia |
|
|
|
E 28 Belarús |
|
|
|
E 29 Estonia |
|
|
|
E 30 Moldova |
|
|
|
E 31 Bosnia y Herzegovina |
|
|
|
E 32 Letonia |
|
|
|
E 34 Bélgica |
|
|
|
E 35 Kazajstán |
|
|
|
E 36 Lituania |
|
|
|
E 37 Turquía |
|
|
|
E 39 Azerbaiyán |
|
|
|
E 40 Macedonia del Norte |
|
|
|
E 43 Japón |
|
|
|
E 45 Australia |
|
|
|
E 46 Ucrania |
|
|
|
E 47 Sudáfrica |
|
|
|
E 48 Nueva Zelanda |
|
|
|
E 49 Chipre |
|
|
|
E 50 Malta |
|
|
|
E 51 República de Corea |
|
|
|
E 52 Malasia |
|
|
|
E 53 Tailandia |
|
|
|
E 54 Albania E 55 Armenia |
|
|
|
E 56 Montenegro |
|
|
|
E 57 San Marino |
|
|
|
E 58 Túnez |
|
|
|
E 60 Georgia |
|
|
|
E 62 Egipto |
|
|
|
E 63 Nigeria |
|
|
|
[E 64 Pakistán] |
|
|
|
|
|
(*) La lista de Partes contratantes que aplican el Reglamento n.o 157 de las Naciones Unidas se puede consultar en internet: https://treaties.un.org/Pages/ViewDetails.aspx?src=TREATY&mtdsg_no=XI-B-16-15[X]&chapter=11&clang=_en
MODELO A
(véase el punto 4.4 del presente Reglamento)

a = 8 mm mín.
Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión ha sido homologado, por lo que respecta al sistema automático de mantenimiento del carril, en los Países Bajos (E 4) con arreglo al Reglamento n.o 157 de las Naciones Unidas, con el número de homologación 002439. El número de homologación indica que esta se concedió con arreglo a los requisitos del Reglamento n.o 157 de las Naciones Unidas en su versión original.
MODELO B
(véase el punto 4.5 del presente Reglamento)
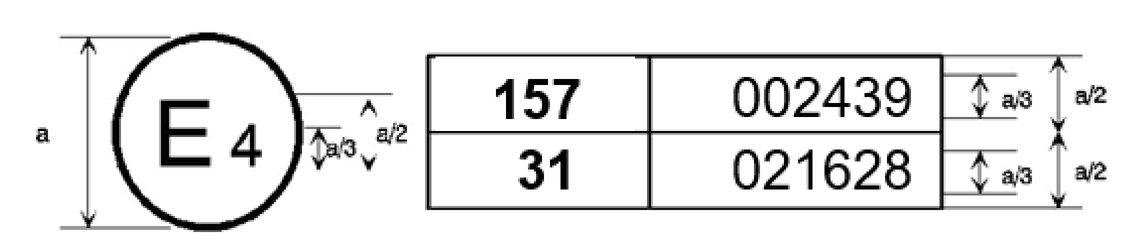
a = 8 mm mín.
Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo ha sido homologado en los Países Bajos (E 4) con arreglo a los Reglamentos n.o 157 y n.o 31 (1). Los números de homologación indican que, cuando se concedieron las homologaciones respectivas, la versión existente del Reglamento n.o 157 de las Naciones Unidas era la original y el Reglamento n.o 31 de las Naciones Unidas incluía la serie 02 de enmiendas.
(1) El segundo número se ofrece únicamente a modo de ejemplo.
1. GENERALIDADES
El presente anexo tiene por objeto asegurar que el fabricante haya realizado un examen minucioso aceptable de la seguridad funcional y operativa del sistema automático que preste las funciones reguladas por el Reglamento relativo al sistema automático de mantenimiento del carril durante los procesos de diseño y desarrollo y que continúe haciéndolo durante todo el ciclo de vida del tipo de vehículo (diseño, desarrollo, producción, uso normal y retirada del servicio).
Comprende la documentación que debe entregar el fabricante a la autoridad de homologación de tipo o al servicio técnico que actúe en su representación (en adelante, la «autoridad de homologación de tipo»), para los efectos de la homologación de tipo.
Esta documentación demostrará que el sistema automático de mantenimiento del carril cumple los requisitos de rendimiento especificados en el presente Reglamento, que está diseñado y desarrollado para funcionar de manera que no entrañe riesgos excesivos para la seguridad del conductor, de los pasajeros y de otros usuarios de la vía.
La autoridad de homologación de tipo que conceda la homologación realizará controles aleatorios y ensayos dirigidos a verificar que la argumentación justificada por la documentación es suficientemente sólida y que el diseño y los procesos en ella descritos son efectivamente aplicados por el fabricante.
Aunque sobre la base de la documentación y las pruebas aportadas y las auditorías de procesos/evaluaciones de productos realizadas a satisfacción de la autoridad de homologación de tipo en relación con el presente Reglamento, el nivel residual de riesgo del sistema automático de mantenimiento del carril que se ha evaluado se considera aceptable para que el tipo de vehículo entre en servicio, la seguridad general del vehículo durante toda la vida útil del sistema automático de mantenimiento del carril de conformidad con los requisitos del presente Reglamento es responsabilidad del fabricante que solicita la homologación de tipo.
2. DEFINICIONES
A los efectos del presente anexo, se aplicarán las definiciones siguientes:
|
2.1. |
El «sistema» es un sistema «electrónico de control de nivel superior» y sus «sistemas electrónicos de control» que ejecutan la función de conducción autónoma. Esto también incluye cualquier enlace de transmisión hacia o desde otros sistemas no incluidos en el ámbito de aplicación del presente Reglamento y que actúe sobre la función automática de mantenimiento del carril. |
|
2.2. |
El «concepto de seguridad» es una descripción de las medidas integradas en el sistema, por ejemplo, en las unidades electrónicas, para que el vehículo funcione sin riesgos excesivos para la seguridad del conductor, de los pasajeros y de otros usuarios de la vía en presencia o ausencia de defectos. La posibilidad de recurrir a un funcionamiento parcial o incluso a un sistema de reserva para mantener las funciones esenciales del vehículo formará parte del concepto de seguridad. |
|
2.3. |
El «sistema de control electrónico» es una combinación de unidades diseñadas para producir conjuntamente la función automática de mantenimiento del carril declarada, por medio del tratamiento electrónico de los datos. Estos sistemas, controlados a menudo mediante software, se construyen a partir de componentes funcionales diferenciados, como sensores, unidades de control electrónico y actuadores, y se conectan mediante enlaces de transmisión. Pueden comprender elementos mecánicos, electroneumáticos o electrohidráulicos. |
|
2.4. |
Los sistemas «electrónicos de control de nivel superior» son aquellos que emplean dispositivos de procesamiento o detección para ejecutar la tarea de conducción dinámica. |
|
2.5. |
Las «unidades» son las divisiones más pequeñas de los componentes del sistema que se considerarán en el presente anexo, ya que estas combinaciones de componentes se tratarán como entidades únicas a efectos de identificación, análisis o sustitución. |
|
2.6. |
«Enlaces de transmisión» son los medios utilizados para interconectar las unidades distribuidas, con el fin de transmitir señales, datos relativos al funcionamiento o un suministro de energía. Este equipo es, por lo general, eléctrico, pero puede ser en parte mecánico, neumático o hidráulico. |
|
2.7. |
El «ámbito de control» es una variable de salida que define el ámbito en el que el sistema puede ejercer su control. |
|
2.8. |
«Límites de funcionamiento efectivo» son los límites físicos externos dentro de los cuales el sistema puede ejecutar las tareas de conducción dinámica (es decir, incluidas las demandas de transición y las maniobras de riesgo mínimo). |
|
2.9. |
El «dominio del diseño operativo» del sistema automático de mantenimiento del carril define las condiciones específicas de funcionamiento (por ejemplo, ambientales, geográficas, hora del día, infraestructura, intervalo de velocidades, meteorología y otras condiciones) dentro de los límites establecidos por el presente Reglamento conforme a los cuales está el sistema automático de mantenimiento del carril diseñado para funcionar sin intervención del conductor. |
|
2.10. |
La «función de conducción autónoma» es una función del «sistema» que es capaz de ejecutar la tarea de conducción dinámica del vehículo. |
|
2.11. |
La «estrategia de control» es una estrategia para garantizar la solidez y seguridad del funcionamiento del «sistema» en respuesta a un conjunto específico de condiciones ambientales u operativas (como el estado de la superficie de la carretera, la intensidad del tráfico y otros usuarios de la vía, condiciones meteorológicas adversas, etcétera). Esto puede incluir la desactivación automática de una función o de restricciones temporales de rendimiento (por ejemplo, una reducción de la velocidad máxima en servicio, etc.). |
|
2.12. |
La «seguridad funcional» es la ausencia de riesgos excesivos ante la incidencia de peligros causados por un mal funcionamiento de los sistemas eléctricos y electrónicos (peligros para la seguridad derivados de defectos del sistema). |
|
2.13. |
Un «defecto» es una circunstancia anómala que puede provocar el fallo de un elemento (sistema, componente o software) o un equipo (sistema o combinación de sistemas que ejecutan una función de un vehículo). |
|
2.14. |
Un «fallo» es el cese de un comportamiento previsto de un elemento o de un equipo. |
|
2.15. |
La «seguridad operativa» es la ausencia de riesgos excesivos ante la incidencia de peligros derivados de insuficiencias funcionales de la funcionalidad prevista (por ejemplo, un falso positivo/negativo en la detección), perturbaciones del funcionamiento (por ejemplo, condiciones ambientales como niebla, lluvia, sombra, luz solar o infraestructura) o mediante la previsión razonable de usos indebidos o errores por parte del conductor, los pasajeros u otros usuarios de la vía (peligros para la seguridad, sin defectos del sistema). |
|
2.16. |
«Riesgo excesivo» es el nivel general de riesgo para el conductor, para los ocupantes del vehículo y para otros usuarios de la vía que aumenta en comparación con un vehículo manejado por un conductor competente y cuidadoso. |
3. DOCUMENTACIÓN
|
3.1. |
Requisitos
El fabricante deberá presentar documentación que muestre el diseño básico del «sistema» y los medios por los que se conecta con otros sistemas del vehículo o mediante los cuales controla directamente las variables de salida. Deberán explicarse las funciones del «sistema», incluidas las estrategias de control, y el concepto de seguridad, según estén establecidos por el fabricante. La documentación deberá ser breve, pero aportará pruebas de que en el diseño y el desarrollo se han aprovechado los conocimientos especializados de todos los ámbitos relacionados con el «sistema». De cara a las inspecciones técnicas periódicas, la documentación deberá describir el modo de comprobar el estado de funcionamiento actual del «sistema». La información sobre cómo se puede leer la versión o las versiones del software y el estado de la señal de aviso de fallo de forma normalizada mediante el uso de una interfaz de comunicación electrónica, como mínimo mediante la interfaz estándar (puerto DAB). La autoridad de homologación de tipo deberá determinar si la documentación demuestra que el «sistema»:
|
|
3.1.1. |
La documentación deberá estar disponible en tres partes:
|
|
3.2. |
Descripción de las funciones del «sistema», incluidas las estrategias de control
Deberá facilitarse una descripción que ofrezca una explicación sencilla de todas las funciones del «sistema», incluidas las estrategias de control, y de los métodos empleados para ejecutar las tareas de conducción dinámica dentro del dominio del diseño operativo y los límites conforme a los cuales esté el sistema automático de mantenimiento del carril diseñado para funcionar, incluida una declaración de los mecanismos por los cuales se ejerza dicho control. El fabricante describirá las interacciones esperadas entre el sistema y el conductor, los ocupantes del vehículo y otros usuarios de la vía, así como la interfaz persona-máquina (IPM). Deberán declararse todas las funciones de conducción autónoma habilitadas o deshabilitadas para las que el vehículo incorpore hardware y software en el momento de la producción, y estarán sujetas a los requisitos del presente anexo, antes de utilizarse en el vehículo. El fabricante también documentará el procesamiento de los datos en el caso de que se apliquen algoritmos de aprendizaje continuo. |
|
3.2.1. |
Deberá proporcionarse una lista de todas las variables de entrada y detectadas e indicarse su intervalo de funcionamiento, junto con una descripción de cómo afecta cada variable al comportamiento del sistema. |
|
3.2.2. |
Deberá facilitarse una lista de todas las variables de salida que estén controladas por el «sistema» y explicarse, en cada caso, si dicho control es directo o se ejerce a través de otro sistema del vehículo. Deberá definirse el ámbito de control (punto 2.7) ejercido sobre cada una de estas variables. |
|
3.2.3. |
Cuando sea pertinente desde el punto de vista del rendimiento del sistema automático de mantenimiento del carril, deberán indicarse los límites de funcionamiento efectivo, incluidos los límites del dominio del diseño operativo. |
|
3.2.4. |
Se explicará el concepto de interacción con el conductor cuando se alcancen los límites del dominio del diseño operativo, incluida la lista de tipos de situaciones en las que el sistema generará una demanda de transición al conductor. |
|
3.2.5. |
Deberá facilitarse información acerca de los medios de activación, anulación o desactivación del sistema, incluida la estrategia de protección del sistema contra su desactivación no intencionada. También se incluirá información sobre la forma en que el sistema detecta que el conductor está disponible para asumir el control de la conducción, junto con especificaciones y pruebas documentales del parámetro utilizado para determinar que el conductor está atento, así como la influencia sobre los umbrales de dirección. |
|
3.3. |
Configuración y esquema del sistema |
|
3.3.1. |
Inventario de componentes
Deberá facilitarse una lista en la que se enumeren todas las unidades del «sistema» y se indique qué otros sistemas del vehículo son necesarios para lograr la función de control de que se trate. Deberá proporcionarse un esquema que muestre la combinación de estas unidades e ilustre claramente la distribución de los equipos y las interconexiones. Dicho esquema deberá incluir:
|
|
3.3.2. |
Funciones de las unidades
Se indicará la función de cada unidad del «sistema» y se mostrarán las señales por las que se establezca su vinculación a otras unidades u otros sistemas del vehículo. Esta información podrá suministrarse mediante un diagrama de bloques con etiquetas u otro tipo de esquema, o mediante una descripción acompañada de un diagrama de este tipo. |
|
3.3.3. |
Las interconexiones dentro del «sistema» se mostrarán mediante un diagrama de circuitos para los enlaces de transmisión eléctricos, mediante un diagrama de conductos para el mecanismo de transmisión neumático o hidráulico, y mediante un diagrama simplificado para los enlaces mecánicos que muestre la ubicación de los mismos. Se mostrarán también los enlaces de transmisión hacia y desde otros sistemas. |
|
3.3.4. |
Existirá una correspondencia clara entre estos enlaces de transmisión y las señales transmitidas entre las unidades. Se establecerán prioridades de las señales en canales de datos multiplexados, siempre que la prioridad pueda constituir un elemento que afecte al rendimiento o a la seguridad. |
|
3.3.5. |
Identificación de las unidades
Cada unidad deberá estar identificada de manera clara e inequívoca (por ejemplo, mediante marcado en el caso del hardware y mediante marcado o una salida de software en el caso del software) para poder asociar el hardware a la documentación correspondiente. Cuando se pueda cambiar la versión de software sin necesidad de sustituir el marcado o el componente, el software deberá identificarse únicamente por medio de una salida de software. Cuando varias funciones se combinen en una única unidad o, de hecho, en un único ordenador, pero en el correspondiente diagrama se muestren en múltiples bloques para mayor claridad y para facilitar su explicación, deberá utilizarse solamente una marca de identificación del hardware. Al utilizar esta identificación, el fabricante estará afirmando que el equipo suministrado es conforme con el documento correspondiente. |
|
3.3.5.1. |
La identificación define la versión de hardware y software y, en el caso de que esta última cambie de modo que altere la función de la unidad por lo que respecta al presente Reglamento, deberá cambiarse también la identificación. |
|
3.3.6. |
Instalación de componentes del sistema de detección
El fabricante facilitará información relativa a las opciones de instalación que se emplearán para los componentes individuales que comprenden el sistema de detección. Dichas opciones abarcarán, entre otras, la ubicación del componente en el vehículo, los materiales alrededor del componente, el dimensionamiento y la geometría de los materiales alrededor del componente, y el acabado superficial de los materiales alrededor del componente, una vez instalados en el vehículo. Esta información también incluirá especificaciones de instalación que sean críticas para el rendimiento del sistema, por ejemplo, las tolerancias del ángulo de instalación. Todos los cambios introducidos en los distintos componentes del sistema de detección, o de las opciones de instalación, se notificarán a la autoridad de homologación de tipo y estarán sujetos a evaluación. |
|
3.4. |
Concepto de seguridad del fabricante |
|
3.4.1. |
El fabricante presentará una declaración en la que afirme que el «sistema» no entraña riesgos excesivos para el conductor, para los pasajeros y para otros usuarios de la vía. |
|
3.4.2. |
En cuanto al software empleado en el «sistema», se explicará su arquitectura básica y se indicarán los métodos y herramientas de diseño utilizados (véase el punto 3.5.1). El fabricante presentará pruebas de los medios utilizados para determinar la realización de la lógica del sistema durante el proceso de diseño y de desarrollo. |
|
3.4.3. |
El fabricante proporcionará a la autoridad de homologación de tipo una explicación de las disposiciones de diseño integradas en el «sistema» para garantizar su seguridad funcional y operativa. Tales disposiciones de diseño del «sistema» pueden ser, por ejemplo:
|
|
3.4.3.1. |
Si la medida elegida selecciona un modo de funcionamiento de rendimiento parcial en determinadas condiciones de fallo (por ejemplo, en caso de fallos graves), deberán especificarse dichas condiciones (por ejemplo, el tipo de fallo grave) y definirse los límites de eficacia resultantes (por ejemplo, inicio inmediato de una maniobra de riesgo mínimo), así como la estrategia de aviso al conductor. |
|
3.4.3.2. |
Si la medida elegida selecciona un medio secundario (de reserva) para ejecutar la tarea de conducción dinámica, se explicarán los principios del mecanismo que permite cambiar a dicho medio, la lógica y el nivel de redundancia, así como todas las características de comprobación de reserva incorporadas, y deberán definirse los límites de la eficacia de reserva resultantes. |
|
3.4.3.3. |
Si la medida elegida selecciona la supresión de la función de conducción autónoma, ello se hará en cumplimiento de las disposiciones pertinentes del presente Reglamento. Deberán inhibirse todas las señales de control de salida asociadas a dicha función. |
|
3.4.4. |
La documentación deberá ir acompañada de un análisis que muestre, en términos generales, cómo se comportará el sistema para mitigar o evitar los peligros que puedan afectar a la seguridad del conductor, los pasajeros y otros usuarios de la vía.
El fabricante establecerá y mantendrá los enfoques analíticos elegidos y los pondrá a disposición de la autoridad de homologación de tipo para su inspección en el momento de la homologación de tipo. La autoridad de homologación de tipo evaluará la aplicación de los enfoques analíticos, para lo cual realizará:
La inspección confirmará que al menos cada uno de los siguientes aspectos esté cubierto cuando proceda en virtud de las letras a) hasta c):
La evaluación por parte de la autoridad de homologación consistirá en controles aleatorios de determinados peligros (o ciberamenazas) para establecer que la argumentación que justifica el concepto de seguridad es comprensible y lógica y se ha aplicado en las diferentes funciones de los sistemas. Dicha evaluación también verificará que los planes de validación son suficientemente sólidos para demostrar la seguridad (por ejemplo, una cobertura razonable de los ensayos realizados en los escenarios elegidos por la herramienta de validación elegida) y que se han llevado a cabo. Demostrará que el vehículo no entraña riesgos excesivos para el conductor, los ocupantes del vehículo y otros usuarios de la vía en el dominio del diseño operativo, es decir, mediante:
la autoridad de homologación de tipo realizará o hará que se realicen los ensayos especificados en el apartado 4 para verificar el concepto de seguridad. |
|
3.4.4.1. |
Esta documentación enumerará los parámetros objeto de seguimiento e indicará, para cada condición de fallo del tipo definido en el punto 3.4.4 del presente anexo, la señal de aviso que deberá recibir el conductor/los ocupantes del vehículo/otros usuarios de la vía o el personal encargado del mantenimiento o de la inspección técnica. |
|
3.4.4.2. |
En esta documentación se describirán las medidas adoptadas para garantizar que el «sistema» no entrañe riesgos excesivos para el conductor, para los ocupantes del vehículo, y para otros usuarios de la vía si el rendimiento de dicho «sistema» resulta afectado por las condiciones ambientales, tales como la situación climática, la temperatura, la exposición al polvo, la exposición al agua o la acumulación de hielo. |
|
3.5. |
Sistema de gestión de la seguridad (auditoría de procesos) |
|
3.5.1. |
En relación con el hardware y el software empleados en el sistema, el fabricante demostrará, a satisfacción de la autoridad de homologación de tipo por lo que respecta al sistema de gestión de la seguridad, que existen procesos, metodologías y herramientas eficaces, actualizados y seguidos por la organización para gestionar la seguridad y el cumplimiento permanente durante todo el ciclo de vida del producto (diseño, desarrollo, producción, funcionamiento incluido el respeto a las normas de tráfico, y retirada del servicio). |
|
3.5.2. |
Se establecerá el proceso de diseño y desarrollo, incluido el sistema de gestión de la seguridad, gestión de los requisitos, aplicación de los requisitos, ensayos, seguimiento de fallos, reparación y autorización. |
|
3.5.3. |
El fabricante establecerá y mantendrá canales de comunicación eficaces entre los departamentos del fabricante responsables de la seguridad funcional/operativa, la ciberseguridad y cualquier otra disciplina pertinente relacionada con la seguridad del vehículo. |
|
3.5.4. |
El fabricante contará con procesos de control de incidentes pertinentes para la seguridad o choques/colisiones provocados por el sistema automático de mantenimiento del carril activado y un proceso de gestión de posibles deficiencias pertinentes para la seguridad posteriores a la matriculación (circuito cerrado de seguimiento sobre el terreno) y actualización de los vehículos. Notificarán los incidentes críticos (por ejemplo, colisión con otros usuarios de la vía y posibles deficiencias pertinentes para la seguridad) a las autoridades de homologación de tipo. |
|
3.5.5. |
El fabricante demostrará que se llevan a cabo auditorías internas de los procesos de forma periódica e independiente para garantizar que los procesos establecidos de conformidad con los puntos 3.5.1 hasta 3.5.4 se aplican de forma sistemática. |
|
3.5.6. |
Los fabricantes establecerán mecanismos adecuados con los proveedores (por ejemplo, disposiciones contractuales, interfaces claras o un sistema de gestión de la calidad) para asegurar que el sistema de gestión de la seguridad de los proveedores cumpla con los requisitos de los puntos 3.5.1 (a excepción de los aspectos relacionados con el vehículo como el «funcionamiento» y la «retirada del servicio»), 3.5.2, 3.5.3 y 3.5.5. |
4. VERIFICACIÓN Y ENSAYOS
|
4.1. |
El funcionamiento del «sistema», expuesto en los documentos exigidos en el punto 3, deberá someterse a ensayo como se expone a continuación. |
|
4.1.1. |
Verificación del funcionamiento del «sistema»
La autoridad de homologación de tipo verificará el «sistema» en condiciones de ausencia de fallos realizando ensayos en pista de una serie de funciones seleccionadas de entre las descritas por el fabricante en el punto 3.2, y comprobando el comportamiento general del sistema en condiciones reales de conducción, incluido el cumplimiento de las normas de tráfico. Estos ensayos incluirán escenarios en los que el sistema es anulado por el conductor. Los ensayos realizados con arreglo a lo dispuesto en el presente anexo tendrán en cuenta los ensayos ya realizados en el anexo 5 del presente Reglamento. |
|
4.1.1.1. |
Los resultados de la verificación se corresponderán con la descripción, incluidas las estrategias de control, facilitada por el fabricante en el punto 3.2 y cumplirán los requisitos del presente Reglamento. |
|
4.1.2. |
Verificación del concepto de seguridad del punto 3.4
Se comprobará la reacción del «sistema» bajo la influencia de un defecto en cualquiera de las unidades aplicando las señales de salida correspondientes a unidades eléctricas o elementos mecánicos, con el fin de simular los efectos de fallos ocurridos en el interior de la unidad. La autoridad de homologación de tipo llevará a cabo dicha comprobación respecto a, como mínimo, una unidad, pero no comprobará la reacción del «sistema» ante múltiples fallos simultáneos de distintas unidades. La autoridad de homologación de tipo verificará que estos ensayos incluyan aspectos que puedan incidir en la controlabilidad del vehículo y la información del usuario (aspectos de la interfaz persona-máquina, por ejemplo, escenarios de transición). |
|
4.1.2.1. |
Las autoridades de homologación de tipo también comprobarán distintos escenarios que sean críticos para la detección de objetos y eventos, y respuesta y la caracterización del proceso decisorio y las funciones IPM del sistema (por ejemplo, objeto difícil de detectar, cuándo alcanza el sistema los límites del dominio del diseño operativo o escenarios de perturbación del tráfico) de acuerdo con lo definido en el Reglamento. |
|
4.1.2.2. |
Los resultados de la verificación deberán corresponderse con el resumen documentado del análisis de fallos, hasta un nivel de efecto global que confirme que el concepto de seguridad y la ejecución son adecuados y cumplen los requisitos del presente Reglamento. |
|
4.2. |
Podrán utilizarse herramientas de simulación y modelos matemáticos para la verificación del concepto de seguridad de conformidad con el Anexo 8 de la Revisión 3 del Acuerdo de 1958, en particular en relación con escenarios que sean difíciles en una pista de pruebas o en condiciones de conducción real. Los fabricantes demostrarán el ámbito de aplicación de la herramienta de simulación y su validez para el escenario de que se trate, así como la validación realizada para la cadena de la herramienta de simulación (correlación del resultado con los ensayos físicos). |
5. NOTIFICACIÓN
La notificación de la evaluación se realizará de tal manera que permita su trazabilidad, por ejemplo, mediante la codificación y enumeración en los registros del servicio técnico de las versiones de los documentos inspeccionados.
El apéndice 1 del presente anexo recoge un ejemplo de modelo de formulario de evaluación remitido por el servicio técnico a la autoridad de homologación de tipo. Los equipos enumerados en este apéndice se presentan como el conjunto mínimo de equipos que es necesario abarcar.
6. COMUNICACIÓN A OTRAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO (APÉNDICE 2) QUE INCLUYA:
|
a) |
Descripción del dominio del diseño operativo y de la arquitectura funcional de alto nivel que detalle las funciones disponibles para el conductor, para los ocupantes del vehículo y para otros usuarios de la vía. |
|
b) |
Resultados de los ensayos durante el proceso de verificación por las autoridades de homologación de tipo. |
7. COMPETENCIA DE LOS AUDITORES/EVALUADORES
Las evaluaciones realizadas conforme a lo dispuesto en el presente anexo serán realizadas únicamente por auditores/evaluadores que posean los conocimientos técnicos y administrativos necesarios para tal fin. En particular, serán competentes como auditores o evaluadores conforme a la norma ISO 26262-2018 (Seguridad funcional: vehículos de carretera) y la norma ISO/PAS 21448 (Seguridad de la funcionalidad prevista de los vehículos de carretera); y serán capaces de establecer la relación necesaria con los aspectos relativos a la ciberseguridad de conformidad con el Reglamento n.o 155 de las Naciones Unidas y la norma ISO/SAE 21434). Esta competencia deberá demostrarse mediante titulaciones adecuadas u otra acreditación de formación equivalente.
Apéndice 1
Modelo de formulario de evaluación del sistema automático de mantenimiento del carril
Informe de ensayo n.o: …
1.
Identificación
1.1.
Marca: …
1.2.
Tipo de vehículo: …
1.3.
Medio de identificación del sistema en el vehículo: …
1.4.
Ubicación de esa marca: …
1.5.
Nombre y dirección del fabricante: …
1.6.
En su caso, nombre y dirección del representante del fabricante: …
1.7.
Documentación oficial del fabricante:N.o de referencia de la documentación: …
Fecha de expedición original: …
Fecha de la última actualización: …
2.
Descripción de los vehículos/sistemas de ensayo
2.1.
Descripción general: …
2.2.
Descripción de todas las funciones de control del «sistema» y los métodos de funcionamiento: …
2.3.
Descripción de los componentes y diagramas de las interconexiones dentro del «sistema»:
3.
Concepto de seguridad del fabricante
3.1.
Descripción del flujo de señales y los datos relativos al funcionamiento y de sus prioridades: …
3.2.
Declaración del fabricante:El/Los fabricante(s)…afirma(n) que el «sistema» no entraña riesgos excesivos para el conductor, para los ocupantes del vehículo y para otros usuarios de la vía.
3.3.
Arquitectura básica del software y métodos y herramientas de diseño utilizados: …
3.4.
Explicación del concepto de seguridad del «sistema»: …
3.5.
Análisis documentado del comportamiento del «sistema» en las distintas condiciones de peligro o fallo: …
3.6.
Descripción de las medidas existentes respecto a las condiciones ambientales: …
3.7.
3.8.
Resultados del ensayo de verificación del «sistema», de acuerdo con el punto 4.1.1 del anexo 4 del Reglamento n.o 157 de las Naciones Unidas: …
3.9.
Resultados del ensayo de verificación del concepto de seguridad, de acuerdo con el punto 4.1.2 del anexo 4 del Reglamento n.o 157 de las Naciones Unidas: …
3.10.
Fecha del ensayo: …
3.11.
Este ensayo se ha llevado a cabo y sus resultados se han consignado de conformidad con del Reglamento n.o 157 de las Naciones Unidas, modificado en último lugar por la serie ... de enmiendas.Servicio técnico que ha realizado el ensayo
Firmado: …Fecha: …
3.12.
Observaciones: …
Apéndice 2
Formulario del documento informativo de los sistemas automáticos de mantenimiento del carril que deberá ser facilitado por el fabricante para la homologación
1. DESCRIPCIÓN DEL SISTEMA AUTOMÁTICO DE MANTENIMIENTO DEL CARRIL
|
1.1. |
Dominio del diseño operativo (velocidad, tipo de carretera, país, entorno, condiciones de la carretera, etcétera) / condiciones límite / condiciones principales para las maniobras de riesgo mínimo y las demandas de transición … |
|
1.2. |
Funcionamiento básico (por ejemplo, detección de objetos y eventos, y respuesta] … |
|
1.3. |
Los medios de activación, anulación o desactivación del sistema. … |
2. DESCRIPCIÓN DE LAS FUNCIONES DEL «SISTEMA», INCLUIDAS LAS ESTRATEGIAS DE CONTROL
|
2.1. |
Principales funciones de conducción autónoma (arquitectura funcional, percepción ambiental). … |
|
2.1.1. |
Vehículo-internas … |
|
2.1.2. |
Vehículo-externas (por ejemplo, servidor backend) … |
3. LISTA DE PRINCIPALES COMPONENTES (UNIDADES) DEL «SISTEMA»
|
3.1. |
Unidades de control … |
|
3.2. |
Sensores … |
|
3.3. |
Mapas/posicionamiento … |
4. CONFIGURACIÓN Y ESQUEMA DEL SISTEMA
|
4.1. |
Configuración esquemática del sistema, incluidos los sensores de percepción ambiental (por ejemplo, diagrama de bloques) … |
|
4.2. |
Lista y esquema de interconexiones (por ejemplo, diagrama de bloques) … |
5. ESPECIFICACIONES
|
5.1. |
Medios para comprobar el correcto estado de funcionamiento del sistema … |
|
5.2. |
Medios aplicados como protección contra la activación/operación e intervenciones no autorizadas en el sistema … |
6. CONCEPTO DE SEGURIDAD
|
6.1. |
Seguridad de funcionamiento – Declaración del fabricante del vehículo … |
|
6.2. |
Arquitectura básica de software (por ejemplo, diagrama de bloques) … |
|
6.3. |
Medios por los que se determina la realización de la lógica del sistema … |
|
6.4. |
Explicación general de las principales disposiciones de diseño integradas en el «sistema» a fin de generar seguridad de funcionamiento e interacción con otros usuarios de la vía en condiciones de fallo, con perturbaciones del funcionamiento y con la incidencia de condiciones planificadas o no que excederían el dominio del diseño operativo. … |
|
6.5. |
Descripción general de los principios más importantes de gestión de fallos, estrategia alternativa incluida la estrategia de mitigación de riesgos (maniobra de riesgo mínimo) … |
|
6.6. |
Interacción del conductor, los ocupantes del vehículo y otros usuarios de la vía incluidas las señales de aviso y las demandas de transición emitidas para el conductor. … |
|
6.7. |
Validación por el fabricante de los requisitos de rendimiento especificados en otras partes del Reglamento, incluido la detección de objetos y eventos, y respuesta, la IMP, el cumplimiento de las normas de tráfico y la conclusión de que el sistema está diseñado de tal manera que no entrañe riesgos excesivos para el conductor, los ocupantes del vehículo y otros usuarios de la vía. … |
7. VERIFICACIÓN Y ENSAYO POR LAS AUTORIDADES
|
7.1. |
Verificación del funcionamiento básico del «sistema» … |
|
7.2. |
Ejemplos para comprobar la reacción del sistema bajo la influencia de un fallo o una perturbación del funcionamiento, condiciones de emergencia y condiciones límite … |
8. SISTEMA DE ALMACENAMIENTO DE DATOS
|
8.1. |
Tipos de datos almacenados … |
|
8.2. |
Ubicación de almacenamiento … |
|
8.3. |
Incidencias y elementos de datos registrados, medios para garantizar la seguridad y protección de los datos … |
|
8.4. |
Medios de acceso a los datos … |
9. CIBERSEGURIDAD (ES POSIBLE UNA REFERENCIA CRUZADA AL REGLAMENTO SOBRE CIBERSEGURIDAD)
|
9.1. |
Descripción general del plan de gestión de la ciberseguridad y actualizaciones de software … |
|
9.2. |
Descripción general de los distintos riesgos y medidas aplicadas para mitigar dichos riesgos … |
|
9.3. |
Descripción general del procedimiento de actualización … |
10. DISPOSICIONES DE INFORMACIÓN A LOS USUARIOS
|
10.1. |
Modelo de la información facilitada a los usuarios (incluidas las tareas esperadas del conductor dentro del dominio del diseño operativo y al salir de dicho dominio) … |
|
10.2. |
Extracto de la parte pertinente del manual del propietario … |
Apéndice 3
Guía de escenarios críticos de perturbación del tráfico para el sistema automático de mantenimiento del carril
1. GENERALIDADES
|
1.1 |
En este documento se aclara el proceso por el que se definen las condiciones en las que el sistema automático de mantenimiento del carril (sistema automático de mantenimiento del carril) evitará una colisión. Las condiciones en las que el sistema automático de mantenimiento del carril evitará una colisión se determinan por medio de un programa general de simulación con el consiguiente modelo de rendimiento del conductor humano atento y parámetros relacionados en los escenarios críticos de perturbación del tráfico. |
2. ESCENARIOS CRÍTICOS DE TRÁFICO
|
2.1. |
Los escenarios críticos de perturbación del tráfico son aquellos que presentan condiciones en las que puede que el sistema automático de mantenimiento del carril no sea capaz de evitar una colisión. |
|
2.2. |
Los tres siguientes son escenarios críticos de tráfico:
|
|
2.3. |
Cada uno de estos escenarios críticos de tráfico puede crearse utilizando los siguientes parámetros/elementos:
|
3. MODELO DE RENDIMIENTO DEL SISTEMA AUTOMÁTICO DE MANTENIMIENTO DEL CARRIL
|
3.1. |
Los escenarios críticos de tráfico del sistema automático de mantenimiento del carril se dividen en escenarios eludibles e ineludibles. El umbral entre eludible e ineludible se basa en la actuación simulada de un conductor humano cualificado y atento. Cabe esperar que algunos de los escenarios que son «ineludibles» para las capacidades estándar humanas puedan ser de hecho eludibles para el sistema automático de mantenimiento del carril. |
|
3.2. |
En un escenario sistema automático de mantenimiento del carril de baja velocidad, se presupone que la capacidad de evitación del modelo de conductor es exclusivamente mediante el frenado. El modelo de conductor se divide en los tres segmentos siguientes: «percepción»; «decisión»; y «reacción». El diagrama siguiente es una representación visual de estos segmentos. |
|
3.3. |
Para determinar las condiciones en las que el sistema automático de mantenimiento del carril evitará una colisión, los factores del modelo de rendimiento correspondientes a estos tres segmentos que se indican en el cuadro siguiente deben utilizarse como modelo de rendimiento del sistema, teniendo en cuenta el comportamiento de un conductor humano atento con un sistema avanzado de asistencia a la conducción.
|
Cuadro 1
Factores del modelo de rendimiento para vehículos
|
|
|
Factores |
|
Punto de percepción del riesgo |
Cambio de carril (entrada, salida) |
Desviación del centro de un vehículo más de 0,375 m del centro del carril de circulación (obtenida de estudios de Japón) |
|
Desaceleración |
Tasa de desaceleración del vehículo precedente y distancia de seguridad con el vehículo ego |
|
|
Tiempo de evaluación del riesgo |
0,4 segundos (de estudios de Japón) |
|
|
Tiempo transcurrido desde que finaliza la percepción hasta que comienza la desaceleración |
0,75 segundos (datos comunes en Japón) |
|
|
Tiempo de sacudida hasta la desaceleración máxima (fricción con la carretera 1,0) |
0,6 segundos hasta 0,774G (de experimentos realizados por la NHTSA y Japón) |
|
|
Tiempo de sacudida hasta la desaceleración máxima (tras la colisión de alcance del vehículo ego con el vehículo en incorporación, fricción con la vía 1,0) |
0,6 segundos hasta 0,85G (obtenido del Reglamento n.o 152 de las Naciones Unidas sobre el AEBS) |
|
3.4. |
Modelo de conductor para los tres escenarios del sistema automático de mantenimiento del carril: |
|
3.4.1. |
Para el escenario de incorporación al carril:
El vehículo recorrerá normalmente una distancia de deriva lateral dentro del carril de 0,375 m. El límite percibido para la incorporación se alcanza cuando el vehículo sobrepasa la distancia de deriva lateral normal (posiblemente antes de cambiar efectivamente de carril). La distancia a. es la distancia de percepción basada en el tiempo de percepción [a]. Define la distancia lateral necesaria para percibir que un vehículo está realizando una maniobra de incorporación. La distancia a. se obtiene con la fórmula siguiente: a. = velocidad de movimiento lateral x tiempo de percepción del riesgo [a] (0,4 s) El tiempo de percepción del riesgo comienza cuando el vehículo que va por delante sobrepasa el umbral de incorporación al carril. La velocidad máxima de movimiento lateral es un dato del mundo real en Japón. El tiempo de percepción del riesgo [a] es un dato de simulación de conducción en Japón. El valor de 2 s* se ha especificado como el máximo tiempo para la colisión por debajo del cual se concluye que existe peligro de colisión en sentido longitudinal.
|
|
3.4.2. |
Para el escenario de salida del carril:
El vehículo recorrerá normalmente una distancia de deriva lateral dentro del carril de 0,375 m. El límite percibido para la salida del carril se alcanza cuando el vehículo sobrepasa la distancia de deriva lateral normal (posiblemente antes de cambiar efectivamente de carril). El tiempo de percepción del riesgo [a] es de 0,4 segundos y comienza cuando el vehículo que va por delante sobrepasa el umbral de salida del carril. El tiempo de dos segundos se ha especificado como el máximo intervalo de tiempo de paso con respecto al cual se concluye que existe un peligro en sentido longitudinal.
|
|
3.4.3. |
Para el escenario de desaceleración:
El tiempo de percepción del riesgo [a] es de 0,4 segundos. El tiempo de percepción del riesgo [a] comienza cuando el vehículo precedente sobrepasa un umbral de desaceleración de 5 m/s2.
|
4. PARÁMETROS
|
4.1. |
Los parámetros siguientes son esenciales para describir el patrón de los escenarios críticos de tráfico de la sección 2.1. |
|
4.2. |
Se podrían añadir otros parámetros en función del entorno de funcionamiento (por ejemplo, tasa de fricción de la vía, curvatura de la vía o condiciones de iluminación).
Cuadro 2 Parámetros adicionales
|
|
4.3. |
A continuación, se ofrecen representaciones visuales de los parámetros de los tres tipos de escenarios.
|
5. REFERENCIA
Las siguientes hojas de datos son ejemplos pictóricos de simulaciones que determinan las condiciones en las que el sistema automático de mantenimiento del carril evitará una colisión, teniendo en cuenta la combinación de todos los parámetros cuando se alcanza y cuando no se alcanza la velocidad máxima del vehículo permitida para el sistema automático de mantenimiento del carril.
|
5.1. |
Incorporación al carril
(Imagen de las hojas de datos)
|
|
5.2. |
Salida del carril
Es posible evitar la salida del carril de todos los vehículos en desaceleración (parada) que van por delante del vehículo precedente en las siguientes condiciones de marcha a un intervalo de tiempo de paso de 2,0 s. (Imagen de las hojas de datos)
|
|
5.3. |
Desaceleración
Es posible evitar una desaceleración repentina de -1,0G o menos en la situación de circulación por detrás del vehículo precedente a un intervalo de tiempo de paso de 2,0 s. (Imagen de la hoja de datos)
(Imagen de las hojas de datos)
|
1. INTRODUCCIÓN
En el presente anexo se definen los ensayos destinados a verificar los requisitos técnicos del sistema automático de mantenimiento del carril.
Hasta el momento en que se acuerden disposiciones de ensayo específicas, el servicio técnico se asegurará de que el sistema automático de mantenimiento del carril se someta al menos a los ensayos descritos en el anexo 5. El servicio técnico seleccionará los parámetros específicos de cada ensayo y los registrará en el informe del ensayo de manera que permita la trazabilidad y repetibilidad de la configuración del ensayo.
Los criterios apto/no apto aplicables a los ensayos se derivan exclusivamente de los requisitos técnicos establecidos en los apartados 5 a 7. Estos requisitos están formulados de manera que no solo permiten derivar criterios apto/no apto para un conjunto determinado de parámetros de ensayo, sino para cualquier combinación de parámetros con los que el sistema esté diseñado para funcionar (por ejemplo, intervalo de velocidad operativa, intervalo de aceleración lateral operativa o intervalo de curvatura tal como se incluye en los límites del sistema).
Las especificaciones de ensayo recogidas en el presente documento tienen por objeto establecer un conjunto mínimo de ensayos; las autoridades del servicio técnico podrán realizar cualquier otro ensayo dentro de los límites del sistema y comparar los resultados obtenidos con los requisitos (resultado concreto esperado del ensayo).
2. DEFINICIONES
A los efectos del presente anexo, se aplicarán las definiciones siguientes:
|
2.1. |
El «tiempo para la colisión» es el valor de tiempo que se obtiene dividiendo la distancia longitudinal (en el sentido de marcha del vehículo objeto de ensayo) existente entre el vehículo objeto de ensayo y el objetivo por la velocidad longitudinal relativa del vehículo objeto de ensayo y del objetivo en un instante cualquiera. |
|
2.2. |
La «separación lateral» es la distancia entre el plano longitudinal medianoa del vehículo y del objetivo respectivo en el sentido de circulación, medida en tierra, normalizada por la mitad de la anchura del vehículo con exclusión de dispositivos de visión indirecta y corregida sumando un 50 %. |
|
2.3. |
Un «objetivo en forma de peatón» es un objetivo blando que representa un peatón. |
|
2.4. |
Un «objetivo en forma de turismo» es un objetivo que representa un vehículo de categoría turismo. |
|
2.5. |
Un «objetivo en forma de vehículo de motor de dos ruedas» es una combinación de motocicleta y motociclista. |
3. PRINCIPIOS GENERALES
|
3.1. |
Condiciones de ensayo |
|
3.1.1. |
Los ensayos se realizarán en condiciones (por ejemplo, condiciones ambientales o de geometría de la vía) que permitan la activación del sistema automático de mantenimiento del carril. |
|
3.1.2. |
Si es necesario realizar modificaciones en el sistema para poder llevar a cabo el ensayo, por ejemplo, criterios de evaluación del tipo de carretera o información del tipo de carretera (datos cartográficos), se asegurará que dichas modificaciones no afecten a los resultados del ensayo. En principio se documentarán estas modificaciones en el informe del ensayo y se anexarán al mismo. La descripción y las pruebas de la influencia (en su caso) de estas modificaciones se documentarán en el informe de ensayo y se anexarán al mismo. |
|
3.1.3. |
La superficie de ensayo ofrecerá al menos la adherencia requerida por el escenario a fin de conseguir el resultado esperado del ensayo. |
|
3.1.4. |
Objetivos utilizados en el ensayo |
|
3.1.4.1. |
El objetivo utilizado en los ensayos de detección de vehículos será un vehículo estándar con un elevado volumen de producción en serie de la categoría M o N o, alternativamente, un «objetivo blando» que sea representativo de ese vehículo por lo que se refiere a sus características de identificación aplicables al sistema de sensores del sistema automático de mantenimiento del carril objeto de ensayo conforme a la norma ISO 19206-3:2018. El punto de referencia para la ubicación del vehículo será el punto más atrasado de la línea central del vehículo. |
|
3.1.4.2. |
El objetivo utilizado para los ensayos de vehículos de motor de dos ruedas será un dispositivo de ensayo conforme a la norma ISO CD 19206-5 o una motocicleta de tipo homologado con un elevado volumen de producción en serie de la categoría L3, con un motor de capacidad no superior a 600 cm3. El punto de referencia para la ubicación de la motocicleta será el punto más atrasado de la línea central de la motocicleta. |
|
3.1.4.3. |
En los ensayos de detección de peatones se utilizará un «objetivo blando articulado» representativo de los atributos humanos aplicables al sistema de sensores del sistema automático de mantenimiento del carril objeto de ensayo conforme a la norma ISO 19206-2:2018. |
|
3.1.4.4. |
Los datos que permitan identificar y reproducir específicamente los objetivos deberán registrarse en la documentación de homologación de tipo del vehículo. |
|
3.2. |
Variación de los parámetros de ensayo
El fabricante deberá declarar los límites del sistema al servicio técnico. El servicio técnico definirá diferentes combinaciones de parámetros de ensayo (por ejemplo, velocidad actual del vehículo equipado con sistema automático de mantenimiento del carril, tipo y separación lateral del objetivo, o curvatura del carril) a fin de abarcar escenarios en los que el sistema evitará una colisión y también aquellos en los que no quepa prever que se evite la colisión, en su caso. Si se considera justificado, el servicio técnico podrá ensayar además cualquier otra combinación de parámetros. Si no se puede evitar una colisión con algunos parámetros de ensayo, el fabricante demostrará, ya sea mediante documentación o bien, si es posible, mediante verificaciones o ensayos, que el sistema no cambia injustificadamente su estrategia de control. |
4. ESCENARIOS DE ENSAYO PARA EVALUAR EL RENDIMIENTO DEL SISTEMA CON RESPECTO A LA TAREA DE CONDUCCIÓN DINÁMICA
|
4.1. |
Mantenimiento del carril |
|
4.1.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril no abandona su carril y mantiene una posición estable dentro de su carril ego en todo el intervalo de velocidades y diferentes curvaturas dentro de los límites de su sistema. |
|
4.1.2. |
El ensayo deberá realizarse, como mínimo:
|
|
4.2. |
Evitar una colisión con un usuario de la vía u objeto que bloquee el carril |
|
4.2.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril evita una colisión con un vehículo o usuario de la vía estático o un carril total o parcialmente bloqueado hasta la velocidad máxima especificada del sistema. |
|
4.2.2. |
Este ensayo deberá realizarse al menos:
|
|
4.3. |
Circulación siguiendo a un vehículo precedente |
|
4.3.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril es capaz de mantener y restablecer la distancia de seguridad necesaria con un vehículo precedente y que es capaz de evitar una colisión con dicho vehículo precedente cuando este desacelere al máximo. |
|
4.3.2. |
Este ensayo deberá realizarse al menos:
|
|
4.4. |
Cambio de carril de otro vehículo que se incorpore al carril |
|
4.4.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril es capaz de evitar una colisión con un vehículo que se incorpore al carril del vehículo equipado con dicho sistema hasta una determinada criticidad de la maniobra de incorporación. |
|
4.4.2. |
La criticidad de la maniobra de incorporación al carril se determinará con arreglo al tiempo para la colisión, la distancia longitudinal entre el punto más atrasado del vehículo en incorporación y el punto más adelantado del vehículo sistema automático de mantenimiento del carril, la velocidad lateral del vehículo en incorporación y el movimiento longitudinal del vehículo en incorporación, según se establece en el punto 5.2.5 del presente Reglamento. |
|
4.4.3. |
El ensayo se realizará teniendo en cuenta al menos las siguientes condiciones:
|
|
4.5. |
Obstáculo estático tras el cambio de carril del vehículo precedente |
|
4.5.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril es capaz de evitar una colisión con un vehículo o usuario de la vía estático o un carril bloqueado que se haga visible después de que el vehículo precedente haya evitado una colisión por medio de una maniobra evasiva. |
|
4.5.2. |
El ensayo deberá realizarse, como mínimo:
|
|
4.6. |
Ensayo del campo de visión |
|
4.6.1. |
El ensayo demostrará que el sistema automático de mantenimiento del carril es capaz de detectar otro usuario de la vía dentro de la zona de detección delantera hasta el alcance de detección delantero declarado y un vehículo contiguo dentro del área de detección lateral al menos hasta la anchura completa del carril adyacente. |
|
4.6.2. |
El ensayo del alcance de detección delantero se realizará al menos:
|
|
4.6.3. |
El ensayo del alcance de detección lateral se realizará al menos:
|
5. VERIFICACIÓN ADICIONAL
|
5.1. |
(Reservado) |
|
5.2. |
El fabricante demostrará el cumplimiento de las siguientes disposiciones y el servicio técnico lo evaluará en el momento de la homologación de tipo:
|
|
5.3. |
Se pueden evaluar otros casos de ensayo si el servicio técnico lo considera justificado. Algunos de estos casos pueden ser:
|
|
5.4. |
Ensayo en el mundo real
El servicio técnico realizará o será testigo de una evaluación del sistema en condiciones de ausencia de defectos y en presencia de tráfico (ensayo en el «mundo real»). La finalidad de este ensayo es ayudar al servicio técnico a averiguar cómo funciona el sistema en su entorno de servicio y complementar la evaluación de la documentación proporcionada conforme al anexo 4. En conjunto, la evaluación del anexo 4 y el ensayo en el mundo real permitirán al servicio técnico detectar aspectos del funcionamiento del sistema que pueden requerir evaluación adicional, ya sea mediante ensayos o mediante una revisión adicional del anexo 4. Durante la evaluación en el mundo real, el servicio técnico evaluará, como mínimo:
El servicio técnico determinará la ubicación y selección del itinerario de ensayo, la hora del día y las condiciones ambientales. Se registrará el trayecto de ensayo y se equipará el vehículo de ensayo con instrumentos que no perturben dicho ensayo. El servicio técnico podrá registrar o solicitar registros de cualquier canal de datos utilizado o generado por el sistema según se considere necesario para la evaluación posterior al ensayo. Se recomienda que el ensayo en el mundo real se realice una vez que el sistema haya superado todos los demás ensayos descritos en el presente anexo y una vez finalizada la evaluación de riesgos por el servicio técnico. |
Agència Estatal Butlletí Oficial de l'Estat
Avda. de Manoteras, 54 - 28050 Madrid