Agencia Estatal Boletín Oficial del Estado






Solo los textos originales de la CEPE surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben verificarse en la última versión del documento de situación de la CEPE TRANS/WP.29/343, disponible en: http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Incorpora todo el texto válido hasta:
el suplemento 1 de la serie 01 de enmiendas. Fecha de entrada en vigor: 3 de enero de 2021
Este documento es exclusivamente un instrumento de documentación. Los textos auténticos y jurídicamente vinculantes son los siguientes:
— ECE/TRANS/WP.29/2019/61
— ECE/TRANS/WP.29/2020/10 y
— ECE/TRANS/WP.29/2020/69
ÍNDICE
REGLAMENTO
|
1. |
Ámbito de aplicación |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Especificaciones |
|
6. |
Procedimiento de ensayo |
|
7. |
Modificación del tipo de vehículo y extensión de la homologación |
|
8. |
Conformidad de la producción |
|
9. |
Sanciones por no conformidad de la producción |
|
10. |
Cese definitivo de la producción |
|
11. |
Nombre y dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
ANEXOS
1 Comunicación
2 Ejemplo de marca de homologación
3 Requisitos especiales aplicables a los aspectos relativos a la seguridad de los sistemas electrónicos de control
Introducción
El propósito del presente Reglamento es establecer prescripciones uniformes aplicables a los sistemas avanzados de frenado de emergencia (AEBS) instalados en los vehículos de motor de las categorías M1 y N1 utilizados principalmente en condiciones de conducción urbana.
El sistema deberá detectar automáticamente una posible colisión frontal, avisar adecuadamente al conductor y activar el sistema de frenado del vehículo a fin de desacelerarlo para evitar la colisión o mitigar su gravedad si el conductor no reacciona ante el aviso.
Si se produce un fallo en el sistema, el funcionamiento seguro del vehículo no deberá verse perjudicado.
Mientras el sistema actúa, el conductor puede en cualquier momento, mediante una acción deliberada, por ejemplo realizando una maniobra o pisando a fondo el acelerador, tomar el control y anular el sistema.
El presente Reglamento no puede incluir en el proceso de homologación de tipo todas las condiciones del tráfico y todas las características de la infraestructura; el presente Reglamento reconoce que las prestaciones que exige no pueden conseguirse en todas las condiciones (las prestaciones del sistema pueden verse afectadas por las condiciones del vehículo, la adherencia de la calzada, las condiciones meteorológicas, el deterioro de la infraestructura viaria, las situaciones del tráfico, etc.). Las condiciones y características del mundo real no deben dar lugar a avisos o frenados erróneos hasta el punto que inciten al conductor a desactivar el sistema.
El presente Reglamento es del tipo de reglamentos que se aplican si el sistema está instalado. No impedirá que las Partes contratantes ordenen la instalación de AEBS homologados de acuerdo con las prescripciones que contiene.
1. ÁMBITO DE APLICACIÓN
El presente Reglamento se aplica a la homologación de los vehículos de las categorías M1 y N1 (1) con respecto a un sistema de a bordo para:
a) evitar o mitigar la gravedad de una colisión por alcance con un turismo,
b) evitar o mitigar la gravedad de un impacto contra un peatón.
2. DEFINICIONES
A los efectos del presente Reglamento, se aplicarán las definiciones siguientes:
|
2.1. |
«Sistema avanzado de frenado de emergencia (AEBS, Advanced Emergency Braking System)»: sistema capaz de detectar automáticamente una colisión frontal inminente y de activar el sistema de frenado del vehículo para desacelerarlo a fin de evitar o mitigar la colisión. |
|
2.2. |
«Frenado de emergencia»: demanda de frenado emitida por el AEBS al sistema de frenado de servicio del vehículo. |
|
2.3. |
«Aviso de colisión»: aviso emitido por el AEBS al conductor cuando ha detectado una posible colisión frontal. |
|
2.4. |
«Tipo de vehículo con respecto a su sistema avanzado de frenado de emergencia»: categoría de vehículos que no difieren en aspectos esenciales como: a) las características del vehículo que influyen significativamente en las prestaciones del sistema avanzado de frenado de emergencia; b) el tipo y el diseño del sistema avanzado de frenado de emergencia. |
|
2.5. |
«Vehículo objeto de ensayo»: vehículo que está siendo sometido a los ensayos. |
|
2.6. |
«Objetivo blando»: objetivo que, en caso de colisión, sufrirá un daño mínimo y causará un daño mínimo al vehículo objeto de ensayo. |
|
2.7. |
«Objetivo en forma de vehículo»: objetivo que representa un vehículo. |
|
2.8. |
«Objetivo en forma de peatón»: objetivo que representa un peatón. |
|
2.9. |
«Espacio común»: zona en la que pueden visualizarse dos o más funciones informativas (por ejemplo, símbolos), pero no de manera simultánea. |
|
2.10. |
«Autocomprobación»: función integrada que verifica los fallos del sistema de manera continuada, al menos mientras el sistema está activo. |
|
2.11. |
«Tiempo para colisión»: valor de tiempo que se obtiene dividiendo la distancia longitudinal (en la dirección de la marcha del vehículo objeto de ensayo) existente entre el vehículo objeto de ensayo y el objetivo por la velocidad longitudinal relativa del vehículo objeto de ensayo y del objetivo en un instante cualquiera. |
|
2.12. |
«Calzada seca»: calzada con un coeficiente máximo de frenado nominal de 0,9. |
|
2.13. |
«Coeficiente máximo de frenado»: medida del rozamiento entre el neumático y la superficie de rodadura, basada en la desaceleración máxima de un neumático en rotación. |
|
2.14. |
«Calibración»: proceso de establecimiento de la respuesta de un sistema de medición de manera que su resultado concuerde con una serie de señales de referencia. |
|
2.15. |
«Masa de un vehículo en orden de marcha»: masa de un vehículo sin carga con carrocería, incluidos el refrigerante, los lubricantes, el 90 % del combustible, el 100 % de los demás líquidos y el conductor (75 kg), pero excluidas las aguas usadas, las herramientas y la rueda de repuesto. |
|
2.16. |
«Vehículo sin carga»: masa en orden de marcha con una masa adicional de 125 kg como máximo. Esta masa adicional incluye el equipo de medición y una posible segunda persona en el asiento delantero, encargada de tomar nota de los resultados. |
|
2.17. |
«Vehículo con carga»: salvo que se indique otra cosa, el vehículo cargado de forma que alcance su «masa máxima». |
|
2.18. |
«Masa máxima»: masa máxima técnicamente admisible según la declaración del fabricante del vehículo (esta masa puede ser superior a la «masa máxima admisible» establecida por la Administración nacional). |
3. SOLICITUD DE HOMOLOGACIÓN
|
3.1. |
La solicitud de homologación de un tipo de vehículo por lo que respecta al sistema avanzado de frenado de emergencia deberán presentarla el fabricante del vehículo o su representante autorizado. |
|
3.2. |
Deberá ir acompañada de los documentos que se mencionan a continuación, por triplicado: |
|
3.2.1. |
Una descripción del tipo de vehículo por lo que se refiere a los elementos mencionados en el subapartado 2.4, junto con documentación que muestre el diseño básico del AEBS y los medios por los que se conecta con otros sistemas del vehículo o mediante los cuales controla directamente las variables de salida. Deberán precisarse los números o símbolos identificativos del tipo de vehículo. |
|
3.3. |
Deberá presentarse al servicio técnico encargado de realizar los ensayos de homologación un vehículo representativo del tipo cuya homologación se solicite. |
4. HOMOLOGACIÓN
|
4.1. |
Si el tipo de vehículo presentado a homologación con arreglo al presente Reglamento satisface los requisitos del apartado 5, deberá concederse su homologación. |
|
4.2. |
Se asignará un número de homologación a cada tipo homologado; sus dos primeros dígitos (en la actualidad 00, que corresponden a la serie 00 de enmiendas) indicarán la serie de enmiendas que incorpore las enmiendas técnicas importantes más recientes introducidas en el Reglamento en el momento en que se expidió la homologación. La misma Parte contratante no podrá asignar el mismo número al mismo tipo de vehículo equipado con otro tipo de AEBS, ni a otro tipo de vehículo. |
|
4.3. |
La concesión, la denegación o la retirada de la homologación con arreglo al presente Reglamento se comunicarán a las Partes contratantes del Acuerdo que apliquen este Reglamento por medio de un formulario conforme con el modelo del anexo 1, junto con la documentación facilitada por el solicitante en un formato no superior a A4 (210 × 297 mm), o plegada en dicho formato, y a una escala adecuada, o bien en formato electrónico. |
|
4.4. |
Todo vehículo conforme con un tipo de vehículo homologado con arreglo al presente Reglamento deberá llevar, de manera claramente visible y en un lugar de fácil acceso especificado en el formulario de homologación, una marca de homologación internacional conforme con el modelo descrito en el anexo 2, y consistente en: |
|
4.4.1. |
La letra mayúscula «E» dentro de un círculo seguida del número distintivo del país que ha concedido la homologación (2). |
|
4.4.2. |
El número del presente Reglamento, seguido de la letra «R», un guion y el número de homologación a la derecha del círculo prescrito en el subapartado 4.4.1. |
|
4.5. |
Si el vehículo se ajusta a un tipo de vehículo homologado de acuerdo con otro u otros Reglamentos adjuntos al Acuerdo en el país que haya concedido la homologación con arreglo al presente Reglamento, no será necesario repetir el símbolo prescrito en el subapartado 4.4.1; en ese caso, los números de Reglamento y de homologación, así como los símbolos adicionales, se colocarán en columnas verticales a la derecha del símbolo prescrito en el subapartado 4.4.1. |
|
4.6. |
La marca de homologación deberá ser claramente legible e indeleble. |
|
4.7. |
La marca de homologación deberá ponerse en la placa de datos del vehículo, o cerca de ella. |
5. ESPECIFICACIONES
|
5.1. |
Requisitos generales |
|
5.1.1. |
Todo vehículo equipado con un AEBS que se ajuste a la definición del subapartado 2.1 deberá cumplir los requisitos de rendimiento de los subapartados 5.1 a 5.6.2 del presente Reglamento y los requisitos del Reglamento n.o 13-H de las Naciones Unidas en su serie 01 de enmiendas, en el caso de los vehículos de las categorías M1 y N1, o del Reglamento n.o 13 de las Naciones Unidas en su serie 11 de enmiendas, en el caso de los vehículos de la categoría N1, y estar equipado con una función de frenado antibloqueo de conformidad con los requisitos de rendimiento del anexo 6 del Reglamento n.o 13-H de las Naciones Unidas en su serie 01 de enmiendas o del anexo 13 del Reglamento n.o 13 de las Naciones Unidas en su serie 11 de enmiendas. |
|
5.1.2. |
La eficacia del AEBS no deberá verse afectada negativamente por campos magnéticos o eléctricos. El cumplimiento de esta condición deberá demostrarse mediante el cumplimiento de los requisitos técnicos y la observación de las disposiciones transitorias del Reglamento n.o 10 de las Naciones Unidas en su serie 05 de enmiendas. |
|
5.1.3. |
La conformidad con los aspectos relativos a la seguridad de los sistemas electrónicos de control deberá demostrarse mediante el cumplimiento de los requisitos del anexo 3. |
|
5.1.4. |
Avisos
Además de los avisos de colisión descritos en los subapartados 5.2.1.1 y 5.2.2.1, el sistema deberá proporcionar al conductor los avisos adecuados que se indican a continuación: |
|
5.1.4.1. |
Un aviso de fallo cuando se produzca un fallo en el AEBS que impida que se cumplan los requisitos del presente Reglamento. El aviso deberá ajustarse a lo especificado en el subapartado 5.5.4. |
|
5.1.4.1.1. |
Entre dos autocomprobaciones del AEBS no deberá transcurrir un intervalo de tiempo apreciable y, por consiguiente, en caso de que se produzca un fallo detectable eléctricamente, la señal de aviso deberá iluminarse de inmediato. |
|
5.1.4.1.2. |
Si el sistema no se ha calibrado después de un tiempo de conducción acumulado de quince segundos por encima de una velocidad de 10 km/h, el conductor deberá recibir información al respecto. Esta información deberá persistir hasta que el sistema haya sido calibrado con éxito. |
|
5.1.4.2. |
Si el vehículo está equipado con un medio de desactivación manual del AEBS, se dará un aviso de desactivación cuando se desactive el sistema. El aviso deberá ser conforme con lo especificado en el subapartado 5.4.2. |
|
5.1.4.3. |
Al detectarse un fallo no eléctrico (por ejemplo, si un sensor está tapado o desalineado), deberá iluminarse la señal de aviso definida en el subapartado 5.1.4.1. |
|
5.1.5. |
Frenado de emergencia
Con sujeción a lo dispuesto en los subapartados 5.3.1 y 5.3.2, el sistema deberá intervenir con el frenado de emergencia descrito en los subapartados 5.2.1.2 y 5.2.2.2 a fin de reducir significativamente la velocidad del vehículo objeto de ensayo. |
|
5.1.6. |
Evitación de reacciones erróneas
El sistema deberá estar diseñado de manera que se minimice la generación de señales de aviso de colisión y se evite el frenado autónomo en situaciones en las que el conductor no reconocería la inminencia de una colisión. Esto se demostrará en la evaluación realizada conforme al anexo 3 del presente Reglamento para las situaciones enumeradas en su apéndice 2. |
|
5.2. |
Requisitos específicos |
|
5.2.1. |
Situación coche contra coche |
|
5.2.1.1. |
Aviso de colisión
Cuando la colisión contra un vehículo de la categoría M1, que circule por delante en el mismo carril y a una velocidad relativa superior a la velocidad hasta la cual el vehículo objeto de ensayo es capaz de evitar la colisión, pueda anticiparse 0,8 segundos antes del frenado de emergencia, el aviso de colisión deberá ajustarse a lo especificado en el subapartado 5.5.1 y emitirse, a lo sumo, 0,8 segundos antes de iniciarse el frenado de emergencia. Sin embargo, en caso de que la colisión no pueda anticiparse 0,8 segundos antes del frenado de emergencia, el aviso de colisión deberá emitirse inmediatamente después de la detección. El aviso de colisión podrá interrumpirse si dejan de darse las condiciones de colisión. |
|
5.2.1.2. |
Frenado de emergencia
Cuando el sistema haya detectado la posibilidad de una colisión inminente, el sistema de frenado de servicio del vehículo deberá recibir una demanda de frenado de como mínimo 5,0 m/s2. El frenado de emergencia podrá interrumpirse si dejan de darse las condiciones de colisión. Esta circunstancia se someterá a ensayo con arreglo a los subapartados 6.4 y 6.5. |
|
5.2.1.3. |
Velocidad
El sistema deberá estar activo, como mínimo, en el intervalo de velocidades del vehículo de 10 a 60 km/h y en todas las condiciones de carga del vehículo, salvo que se haya desactivado manualmente de conformidad con el subapartado 5.4. |
|
5.2.1.4. |
Reducción de la velocidad por demanda de frenado
Cuando el sistema esté activado, el AEBS deberá ser capaz de alcanzar la velocidad de impacto relativa máxima indicada en el cuadro que figura más abajo: a) en caso de colisiones con objetivos en constante movimiento o estacionarios; b) sobre calzadas secas; c) en condiciones con y sin carga; d) en situaciones en las que los planos centrales longitudinales de los vehículos no se desplazan más de 0,2 m, y/o e) en condiciones de iluminación ambiente de como mínimo 1 000 luxes. Se reconoce que las prestaciones exigidas en este cuadro pueden no alcanzarse por entero en condiciones distintas de las enumeradas anteriormente. No obstante, en estas otras condiciones, el sistema no deberá desactivar o modificar de manera drástica la estrategia de control. Esto se demostrará con arreglo al anexo 3. Velocidad de impacto relativa máxima (km/h) de los vehículos M1
Velocidad de impacto relativa máxima (km/h) de los vehículos N1 (*1)
|
|
5.2.2. |
Situación coche contra peatón |
|
5.2.2.1. |
Aviso de colisión
Cuando el AEBS haya detectado la posibilidad de una colisión contra un peatón que cruce la calzada a una velocidad constante de 5 km/h, deberá emitirse un aviso de colisión, según lo especificado en el subapartado 5.5.1, no más tarde del inicio de la intervención de frenado de emergencia. El aviso de colisión podrá interrumpirse si dejan de darse las condiciones de colisión. |
|
5.2.2.2. |
Frenado de emergencia
Cuando el sistema haya detectado la posibilidad de una colisión inminente, el sistema de frenado de servicio del vehículo deberá recibir una demanda de frenado de como mínimo 5,0 m/s2. El frenado de emergencia podrá interrumpirse si dejan de darse las condiciones de colisión. Esta circunstancia deberá ensayarse con arreglo al subapartado 6.6. |
|
5.2.2.3. |
Velocidad
El sistema deberá estar activo, como mínimo, en el intervalo de velocidades del vehículo comprendido entre 20 y 60 km/h y en todas las condiciones de carga del vehículo, salvo que se haya desactivado manualmente de conformidad con el subapartado 5.4. |
|
5.2.2.4. |
Reducción de la velocidad por demanda de frenado
Cuando el sistema esté activado, el AEBS deberá ser capaz de alcanzar la velocidad de impacto relativa máxima indicada en el cuadro que figura más abajo: a) cuando haya peatones cruzando con un componente de velocidad lateral no superior a 5 km/h; b) sobre calzadas secas; c) en condiciones con y sin carga; d) en situaciones en las que los planos centrales longitudinales de los vehículos no se desplazan más de 0,2 m; y/o e) en condiciones de iluminación ambiente de como mínimo 2 000 luxes. Se reconoce que las prestaciones exigidas en este cuadro pueden no alcanzarse por entero en condiciones distintas de las enumeradas anteriormente. No obstante, en estas otras condiciones, el sistema no deberá desactivar o modificar de manera drástica la estrategia de control. Esto se demostrará con arreglo al anexo 3. Velocidad de impacto máxima (km/h) de los vehículos M1 (*2)
Velocidad de impacto máxima (km/h) de los vehículos N1 (*3)
|
|
5.3. |
Interrupción por el conductor |
|
5.3.1. |
El AEBS deberá proporcionar al conductor el medio para interrumpir el aviso de colisión y el frenado de emergencia. |
|
5.3.2. |
En los dos casos señalados, la interrupción podrá iniciarse mediante cualquier acción directa (pisando a fondo el acelerador, accionando el mando de los indicadores de dirección, etc.) que indique que el conductor es consciente de la situación de emergencia. En el momento de la homologación de tipo, el fabricante del vehículo deberá facilitar al servicio técnico una lista de estas acciones directas, que deberá anexarse al acta de ensayo. |
|
5.4. |
Desactivación manual |
|
5.4.1. |
Cuando un vehículo vaya equipado con un medio para desactivar manualmente la función AEBS, serán de aplicación, según proceda, las siguientes condiciones: |
|
5.4.1.1 |
La función AEBS deberá restablecerse automáticamente al inicio de cada nuevo ciclo de encendido. |
|
5.4.1.2. |
El mando del AEBS deberá estar diseñado de tal manera que la desactivación manual no sea posible con menos de dos acciones deliberadas. |
|
5.4.1.3. |
El mando del AEBS deberá instalarse de manera que cumpla los requisitos pertinentes y las disposiciones transitorias del Reglamento n.o 121 de las Naciones Unidas en su serie 01 de enmiendas o en cualquier serie de enmiendas posterior. |
|
5.4.1.4. |
No deberá ser posible desactivar el AEBS a una velocidad superior a 10 km/h. |
|
5.4.2. |
Si el vehículo está equipado con un medio para desactivar automáticamente la función AEBS, por ejemplo cuando se está conduciendo fuera de carretera, está siendo remolcado o se está haciendo funcionar sobre un dinamómetro o en una instalación de lavado, o en caso de desalineación no detectable de los sensores, serán de aplicación, según proceda, las siguientes condiciones: |
|
5.4.2.1. |
En el momento de la homologación de tipo, el fabricante del vehículo deberá facilitar al servicio técnico una lista de las situaciones y los correspondientes criterios que hacen que la función AEBS se desactive automáticamente, lista que deberá anexarse al acta de ensayo. |
|
5.4.2.2. |
La función AEBS se reactivará automáticamente tan pronto como dejen de darse las condiciones que llevaron a la desactivación automática. |
|
5.4.3. |
Una señal de aviso óptica continua informará al conductor de que se ha desactivado la función AEBS. A tal efecto podrá emplearse la señal de aviso amarilla especificada en el subapartado 5.5.4. |
|
5.5. |
Indicación de aviso |
|
5.5.1. |
El aviso de colisión al que se refieren los subapartados 5.2.1.1 y 5.2.2.1 adoptará, al menos, dos de los modos siguientes: acústico, háptico u óptico. |
|
5.5.2. |
En el momento de la homologación de tipo, el fabricante del vehículo deberá facilitar una descripción de la indicación de aviso y de la secuencia en la que las señales de aviso de colisión se presentan al conductor, descripción que deberá registrarse en el acta de ensayo. |
|
5.5.3. |
Cuando se utilice un medio óptico como parte del aviso de colisión, la señal óptica podrá consistir en el destello de la señal de aviso de fallo especificada en el subapartado 5.5.4. |
|
5.5.4. |
El aviso de fallo al que se refiere el subapartado 5.1.4.1 será una señal de aviso óptica amarilla continua. |
|
5.5.5. |
Toda señal de aviso óptica del AEBS deberá activarse cuando el interruptor de encendido (start, arranque) o bien se ponga en la posición on (marcha), o bien esté en una posición intermedia entre on (marcha) y start (arranque) designada por el fabricante como posición de comprobación (sistema inicial [corriente dada]). Este requisito no se aplica a las señales de aviso que se muestran en un espacio común. |
|
5.5.6. |
Las señales de aviso ópticas deberán ser visibles incluso de día; el conductor deberá poder verificar fácilmente desde su asiento el estado correcto de las señales. |
|
5.5.7. |
Cuando el conductor reciba una señal de aviso óptica que le indique que el AEBS está temporalmente indisponible, por ejemplo debido a las malas condiciones meteorológicas, dicha señal será continua y de color amarillo. A tal efecto podrá emplearse la señal de aviso de fallo especificada en el subapartado 5.5.4. |
|
5.6. |
Prescripciones para la inspección técnica periódica |
|
5.6.1. |
Deberá ser posible confirmar en una inspección técnica periódica el correcto estado de funcionamiento del AEBS mediante una observación visual del estado de la señal de aviso de fallo, tras haber comprobado el estado de las bombillas y que la corriente está dada.
Cuando la señal de aviso de fallo se encuentre en un espacio común, deberá comprobarse que este funciona antes de verificar el estado de la señal de aviso de fallo. |
|
5.6.2. |
En el momento de la homologación de tipo, deberán describirse someramente con carácter confidencial los medios elegidos por el fabricante como protección contra las modificaciones simples no autorizadas del funcionamiento de la señal de aviso de fallo.
Como alternativa, este requisito de protección se cumple si se dispone de un medio secundario para comprobar el correcto estado de funcionamiento del AEBS. |
6. PROCEDIMIENTO DE ENSAYO
|
6.1. |
Condiciones de ensayo |
|
6.1.1. |
El ensayo se llevará a cabo en una superficie de cemento o asfalto llana y seca que ofrezca un buen nivel de adherencia. |
|
6.1.1.1. |
La superficie de la calzada de ensayo deberá tener un coeficiente máximo de frenado nominal (3) de 0,9, salvo que se especifique otra cosa, cuando se mida utilizando, o bien: |
|
6.1.1.2. |
el neumático de ensayo de referencia normalizado E1136 de la American Society for Testing and Materials (ASTM) conforme al método E1337-90 de la ASTM, a una velocidad de 40 mph; o bien |
|
6.1.1.3. |
el método de ensayo de «k» especificado en el apéndice 2 del anexo 6 del Reglamento n.o 13-H de las Naciones Unidas. |
|
6.1.1.4. |
La superficie de ensayo deberá tener una pendiente constante no superior al 1 %. |
|
6.1.2. |
La temperatura ambiente estará comprendida entre 0 y 45 °C. |
|
6.1.3. |
El alcance de visibilidad horizontal deberá permitir que se observe el objetivo a lo largo de todo el ensayo. |
|
6.1.4 |
Los ensayos se efectuarán cuando no haya un viento que pueda afectar a los resultados. |
|
6.1.5. |
La iluminación ambiente natural debe ser homogénea en la zona de ensayo y superior a 1 000 luxes en la situación coche contra coche, según se establece en el subapartado 5.2.1, y a 2 000 luxes en la situación coche contra peatón, según se establece en el subapartado 5.2.2. Conviene asegurarse de que los ensayos no se realicen conduciendo con el sol en posición baja por delante o por detrás. |
|
6.2. |
Condiciones del vehículo |
|
6.2.1. |
Peso de ensayo
El vehículo deberá ser sometido a ensayo, como mínimo, en las condiciones con y sin carga. La distribución de la carga se hará siguiendo la recomendación del fabricante. Una vez iniciado el procedimiento de ensayo, no deberá efectuarse modificación alguna. |
|
6.2.2. |
Acondicionamiento previo al ensayo |
|
6.2.2.1. |
Si lo solicita el fabricante del vehículo:
El vehículo podrá conducirse un máximo de 100 km en una combinación de carreteras urbanas y rurales con otros componentes del tráfico y con mobiliario viario a fin de calibrar el sistema de sensores. El vehículo podrá someterse a una secuencia de frenadas para asegurarse de que el sistema de frenado de servicio esté asentado antes del ensayo. |
|
6.2.2.2. |
En la documentación de homologación de tipo del vehículo se detallará y registrará la estrategia de acondicionamiento previo al ensayo solicitada por el fabricante del vehículo. |
|
6.3. |
Objetivos utilizados en el ensayo |
|
6.3.1. |
El objetivo utilizado en los ensayos de detección de vehículos será un turismo estándar con un elevado volumen de producción en serie de la categoría M1 AA berlina o, alternativamente, un «objetivo blando» que sea representativo de ese vehículo por lo que se refiere a sus características de identificación aplicables al sistema de sensores del AEBS objeto de ensayo conforme a la norma ISO 19206-1:2018. El punto de referencia para la ubicación del vehículo será el punto más atrasado de la línea central del vehículo. |
|
6.3.2. |
En los ensayos de detección de peatones se utilizará un «objetivo blando» representativo de los atributos humanos aplicables al sistema de sensores del AEBS objeto de ensayo conforme a la norma ISO 19206-2:2018. |
|
6.3.3. |
Los datos que permitan identificar y reproducir específicamente los objetivos deberán registrarse en la documentación de homologación de tipo del vehículo. |
|
6.4. |
Ensayo de aviso y activación con un objetivo en forma de vehículo estacionario |
|
6.4.1. |
El vehículo objeto de ensayo se aproximará en línea recta al objetivo estacionario durante al menos dos segundos antes de la parte funcional del ensayo, y la desalineación del vehículo objeto de ensayo con respecto a la línea central del objetivo no deberá superar los 0,2 m.
Los ensayos se realizarán con un vehículo que se desplace a 20, 42 y 60 km/h (con una tolerancia de + 0/– 2 km/h). Si se considera justificado, el servicio técnico podrá ensayar cualquier otra velocidad dentro del intervalo de velocidades indicado en el subapartado 5.2.1.3. La parte funcional del ensayo comenzará cuando el vehículo objeto de ensayo se desplace a una velocidad constante y se encuentre a una distancia del objetivo correspondiente a un tiempo para colisión de al menos cuatro segundos. Desde el inicio de la parte funcional hasta el punto de colisión, el conductor no realizará ningún ajuste de los mandos del vehículo objeto de ensayo, salvo ligeros ajustes del mando de dirección para contrarrestar cualquier desvío. |
|
6.4.2. |
Los tiempos de los modos de aviso de colisión indicados en el subapartado 5.5.1 deberán cumplir lo dispuesto en el subapartado 5.2.1.1. |
|
6.5. |
Ensayo de aviso y activación con un objetivo en forma de vehículo en movimiento |
|
6.5.1. |
El vehículo objeto de ensayo y el objetivo en movimiento se desplazarán en línea recta, en la misma dirección, durante al menos dos segundos antes de la parte funcional del ensayo, y la desalineación del vehículo objeto de ensayo con respecto a la línea central del objetivo no deberá superar los 0,2 m.
Los ensayos se realizarán con un vehículo que se desplace a 30 y 60 km/h y un objetivo que se desplace a 20 km/h (con una tolerancia de + 0/– 2 km/h para ambos). Si se considera justificado, el servicio técnico podrá ensayar cualquier otra velocidad del vehículo objeto de ensayo y del objetivo en forma de vehículo dentro del intervalo de velocidades indicado en el subapartado 5.2.1.3. La parte funcional del ensayo comenzará cuando el vehículo objeto de ensayo se desplace a una velocidad constante y se encuentre a una distancia del objetivo correspondiente a un tiempo para colisión de al menos cuatro segundos. Desde el inicio de la parte funcional del ensayo hasta que el vehículo objeto de ensayo alcance una velocidad igual a la del objetivo, el conductor no realizará ningún ajuste de los mandos del vehículo objeto de ensayo, salvo ligeros ajustes de dirección para contrarrestar cualquier desvío. |
|
6.5.2. |
Los tiempos de los modos de aviso de colisión indicados en el subapartado 5.5.1 deberán cumplir lo dispuesto en el subapartado 5.2.1.1. |
|
6.6. |
Ensayo de aviso y activación con un objetivo en forma de peatón |
|
6.6.1. |
El vehículo objeto de ensayo se aproximará en línea recta al punto de impacto con el objetivo en forma de peatón durante al menos dos segundos antes de la parte funcional del ensayo, y la desalineación del vehículo objeto de ensayo con respecto a la línea central del punto de impacto no deberá superar los 0,1 m.
La parte funcional del ensayo comenzará cuando el vehículo objeto de ensayo se desplace a una velocidad constante y se encuentre a una distancia del punto de impacto correspondiente a un tiempo para colisión de al menos cuatro segundos. El objetivo en forma de peatón se desplazará en línea recta perpendicularmente a la dirección de marcha del vehículo objeto de ensayo a una velocidad constante de 5 km/h ± 0,2 km/h, empezando no antes de que se haya iniciado la parte funcional del ensayo. La colocación del objetivo en forma de peatón deberá coordinarse con el vehículo objeto de ensayo de manera que el punto de impacto de aquel contra la parte frontal de este se encuentre en la línea central longitudinal de este, con una tolerancia no superior a 0,1 m si el vehículo objeto de ensayo mantuviera la velocidad de ensayo prescrita durante toda la parte funcional del ensayo, sin frenar. Los ensayos se realizarán con un vehículo que se desplace a 20, 30 y 60 km/h (con una tolerancia de + 0/– 2 km/h). El servicio técnico podrá ensayar cualquier otra velocidad dentro del intervalo de velocidades indicado en los subapartados 5.2.2.3 y 5.2.2.4. Desde el inicio de la parte funcional hasta que el vehículo objeto de ensayo haya evitado la colisión o haya sobrepasado el punto de impacto con el objetivo en forma de peatón, el conductor no realizará ningún ajuste de los mandos del vehículo objeto de ensayo, salvo ligeros ajustes del mando de dirección para contrarrestar cualquier desvío. El ensayo prescrito anteriormente se llevará a cabo con un «objetivo blando» que represente a un niño de seis años de edad, conforme a lo especificado en el subapartado 6.3.2. |
|
6.6.2. |
Los tiempos de los modos de aviso de colisión indicados en el subapartado 5.5.1 deberán cumplir lo dispuesto en el subapartado 5.2.2.1. |
|
6.7. |
(reservado) |
|
6.8. |
Ensayo de detección de fallos |
|
6.8.1 |
Simular un fallo eléctrico, por ejemplo desconectando la fuente de energía de cualquier componente del AEBS o desconectando cualquier conexión eléctrica entre los componentes del AEBS. Durante la simulación del fallo del AEBS no deberán desconectarse ni las conexiones eléctricas de la señal de aviso al conductor a la que se refiere el subapartado 5.5.4 ni el mando opcional de desactivación manual del AEBS al que se refiere el subapartado 5.4. |
|
6.8.2. |
La señal de aviso de fallo a la que se refiere el subapartado 5.5.4 se activará y permanecerá activada no más tarde de diez segundos después de que el vehículo alcance una velocidad superior a 10 km/h, y se reactivará inmediatamente después de un ciclo de encendido off / encendido on con el vehículo parado, mientras persista el fallo simulado. |
|
6.9. |
Ensayo de desactivación |
|
6.9.1. |
En el caso de vehículos equipados con medios para desactivar el AEBS, poner el interruptor de encendido (arranque) en la posición on (marcha) y desactivar el AEBS. La señal de aviso mencionada en el subapartado 5.4.2 deberá activarse. Poner el interruptor de encendido (arranque) en la posición off. Volver a poner el interruptor de encendido (arranque) en la posición on (marcha) y verificar que la señal de aviso activada previamente no se ha reactivado, lo que indica que el AEBS se ha reinstaurado según lo especificado en el subapartado 5.4.1. Si el sistema de encendido se activa por medio de una llave, el requisito mencionado anteriormente deberá cumplirse sin retirarla. |
|
6.10. |
Solidez del sistema |
|
6.10.1. |
Cualquiera de las situaciones de ensayo descritas, entendiendo por situación una determinada configuración de ensayo a una velocidad del vehículo objeto de ensayo en una condición de carga de una categoría (coche contra coche o coche contra peatón), deberá realizarse dos veces. Si en una de las dos rondas de ensayo no se obtienen los resultados requeridos, podrá repetirse el ensayo una vez. Se considerará que la situación de ensayo se ha ejecutado con éxito si se obtienen los resultados requeridos en dos rondas de ensayo. El número de rondas de ensayo fallidas dentro de una categoría no deberá exceder:
a) del 10 % de las rondas de ensayo realizadas para los ensayos de coche contra coche; y b) del 10 % de las rondas de ensayo realizadas para los ensayos de coche contra peatón. |
|
6.10.2. |
La causa principal de las rondas de ensayo fallidas deberá analizarse junto con el servicio técnico y adjuntarse al acta de ensayo. Si la causa principal no puede relacionarse con una desviación en la configuración de ensayo, el servicio técnico podrá ensayar cualquier otra velocidad dentro del intervalo de velocidades indicado en los subapartados 5.2.1.3, 5.2.1.4, 5.2.2.3 o 5.2.2.4, según proceda. |
|
6.10.3. |
Durante la evaluación conforme al anexo 3, el fabricante deberá demostrar, mediante la documentación adecuada, que el sistema es capaz de ofrecer con fiabilidad los resultados requeridos. |
7. MODIFICACIÓN DEL TIPO DE VEHÍCULO Y EXTENSIÓN DE LA HOMOLOGACIÓN
|
7.1. |
Toda modificación del tipo de vehículo con arreglo a la definición del subapartado 2.4 deberá notificarse a la autoridad de homologación de tipo que lo homologó. Esta podrá entonces: |
|
7.1.1. |
considerar que las modificaciones realizadas no tienen un efecto adverso en las condiciones de concesión de la homologación y conceder una extensión de la homologación; |
|
7.1.2. |
considerar que las modificaciones realizadas afectan a las condiciones de concesión de la homologación y exigir nuevos ensayos o comprobaciones adicionales antes de conceder una extensión de la homologación. |
|
7.2. |
La confirmación o la denegación de la homologación se comunicarán a las Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante el procedimiento indicado en el subapartado 4.3, especificando las modificaciones. |
|
7.3. |
La autoridad de homologación de tipo informará de la extensión a las demás Partes contratantes mediante el formulario de comunicación del anexo 1. Asignará un número de serie a cada extensión, denominado número de extensión. |
8. CONFORMIDAD DE LA PRODUCCIÓN
|
8.1. |
Los procedimientos relativos a la conformidad de la producción deberán ajustarse a los expuestos en el anexo 1 del Acuerdo de 1958 (E/ECE/TRANS/505/Rev.3) y cumplir los requisitos siguientes: |
|
8.2. |
Todo vehículo homologado con arreglo al presente Reglamento deberá fabricarse de modo que sea conforme con el tipo homologado, es decir, cumpliendo los requisitos del apartado 5. |
|
8.3. |
La autoridad de homologación de tipo que haya concedido la homologación podrá verificar en todo momento la conformidad de los métodos de control aplicables a cada unidad de producción. La frecuencia normal de tales inspecciones será de una vez cada dos años. |
9. SANCIONES POR NO CONFORMIDAD DE LA PRODUCCIÓN
|
9.1. |
Podrá retirarse la homologación concedida con respecto a un tipo de vehículo con arreglo al presente Reglamento si no se cumplen los requisitos establecidos en el apartado 8. |
|
9.2. |
Cuando una Parte contratante retire una homologación que había concedido con anterioridad, informará inmediatamente de ello a las demás Partes contratantes que apliquen el presente Reglamento enviándoles un formulario de comunicación conforme con el modelo del anexo 1. |
10. CESE DEFINITIVO DE LA PRODUCCIÓN
Cuando el titular de una homologación cese definitivamente de fabricar un tipo de vehículo homologado con arreglo al presente Reglamento, informará de ello a la autoridad de homologación de tipo que haya concedido la homologación, la cual, a su vez, informará inmediatamente a las demás Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante un formulario de comunicación conforme con el modelo del anexo 1.
11. NOMBRE Y DIRECCIÓN DE LOS SERVICIOS TÉCNICOS ENCARGADOS DE REALIZAR LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes contratantes del Acuerdo que apliquen el presente Reglamento comunicarán a la Secretaría de las Naciones Unidas (4) el nombre y la dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo que concedan la homologación y a las cuales deban remitirse los formularios que certifiquen la concesión, la extensión, la denegación o la retirada de la homologación.
12. DISPOSICIONES TRANSITORIAS
|
12.1. |
A partir de la fecha oficial de entrada en vigor de la serie 01 de enmiendas, ninguna Parte contratante que aplique el presente Reglamento denegará la concesión o la aceptación de homologaciones de tipo con arreglo a la versión del Reglamento modificada por la serie 01 de enmiendas. |
|
12.2. |
A partir del 1 de mayo de 2024, las Partes contratantes que apliquen el presente Reglamento no estarán obligadas a aceptar homologaciones de tipo concedidas con arreglo a la versión original del Reglamento y expedidas por primera vez después del 1 de mayo de 2024. |
|
12.3. |
Hasta el 1 de mayo de 2026, las Partes contratantes que apliquen el presente Reglamento deberán aceptar las homologaciones de tipo concedidas con arreglo a la versión original del Reglamento y expedidas por primera vez antes del 1 de mayo de 2024. |
|
12.4. |
A partir del 1 de mayo de 2026, las Partes contratantes que apliquen el presente Reglamento no estarán obligadas a aceptar homologaciones de tipo expedidas con arreglo a la versión original del Reglamento. |
|
12.5. |
No obstante lo dispuesto en el subapartado 12.4, las Partes contratantes que apliquen el presente Reglamento deberán seguir aceptando las homologaciones de tipo concedidas con arreglo a la versión original del Reglamento en el caso de los vehículos que no se vean afectados por los cambios introducidos por la serie 01 de enmiendas. |
|
12.6. |
Las Partes contratantes que apliquen el presente Reglamento no denegarán la concesión de homologaciones de tipo, o la extensión de estas, con arreglo a cualquiera de las series anteriores de enmiendas del Reglamento. |
(1) Con arreglo a la definición que figura en la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6, apartado 2 www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Los números distintivos de las Partes contratantes del Acuerdo de 1958 se reproducen en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 6.
(*1) Con respecto a velocidades relativas situadas entre los valores indicados (por ejemplo, 53 km/h), se aplicará la velocidad de impacto relativa máxima (esto es, 35/30 km/h) asignada a la velocidad relativa inmediatamente superior (es decir, 55 km/h).
Con respecto a las masas por encima de la masa en orden de marcha, se aplicará la velocidad de impacto relativa máxima asignada a la masa máxima.
(*2) Con respecto a velocidades relativas situadas entre los valores indicados (por ejemplo, 53 km/h), se aplicará la velocidad de impacto relativa máxima (esto es, 30/30 km/h) asignada a la velocidad relativa inmediatamente superior (es decir, 55 km/h).
Con respecto a las masas por encima de la masa en orden de marcha, se aplicará la velocidad de impacto relativa máxima asignada a la masa máxima.
(*3) Con respecto a velocidades del vehículo objeto de ensayo situadas entre los valores indicados (por ejemplo, 53 km/h), se aplicará la velocidad de impacto máxima (esto es, 35/30 km/h) asignada a la velocidad del vehículo objeto de ensayo inmediatamente superior (es decir, 55 km/h).
Con respecto a las masas por encima de la masa en orden de marcha, se aplicará la velocidad de impacto relativa máxima asignada a la masa máxima.
(3) Se entiende por valor «nominal» el valor teórico buscado.
(4) La Secretaría de la CEPE proporciona la plataforma en línea («/343 Application») para intercambiar con ella esa información: https://www.unece.org/trans/main/wp29/datasharing.html
(Formato máximo: A4 [210 x 297 mm])
|
|
Expedida por: Nombre de la administración: |
|
… … |
|
relativa a (2): |
la concesión de la homologación |
|
|
la extensión de la homologación |
|
|
la denegación de la homologación |
|
|
la retirada de la homologación |
|
|
el cese definitivo de la producción |
de un tipo de vehículo con respecto al sistema avanzado de frenado de emergencia con arreglo al Reglamento n.o 152 de las Naciones Unidas
N.o de homologación: …
|
1. |
Marca: … |
|
2. |
Tipo y nombres comerciales: … |
|
3. |
Nombre y dirección del fabricante: … |
|
4. |
En su caso, nombre y dirección del representante del fabricante: … |
|
5. |
Breve descripción del vehículo: … |
|
6. |
Fecha de presentación del vehículo para su homologación: … |
|
7. |
Servicio técnico que realiza los ensayos de homologación: … |
|
8. |
Fecha del acta levantada por dicho servicio: … |
|
9. |
Número del acta levantada por dicho servicio: … |
|
10. |
Homologación concedida/denegada/extendida/retirada2: |
|
11. |
Lugar: … |
|
12. |
Fecha: … |
|
13. |
Firma: … |
|
14. |
Se adjuntan a la presente comunicación los siguientes documentos, que llevan el número de homologación antes indicado: … |
|
15. |
Observaciones: … |
(1) Número distintivo del país que ha concedido, extendido, denegado o retirado la homologación (véanse las disposiciones sobre homologación del Reglamento).
(2) Táchese lo que no proceda.
(véanse los subapartados 4.4 a 4.4.2 del presente Reglamento)
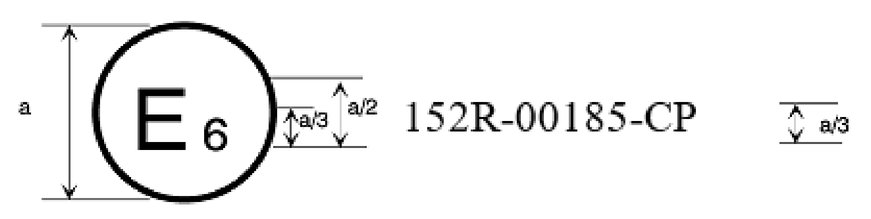
a = 8 mm mín.
Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión ha sido homologado en Bélgica (E 6) por lo que respecta al AEBS con arreglo al Reglamento n.o 152 de las Naciones Unidas (la C indica coche contra coche y la P coche contra peatón). Los dos primeros dígitos del número de homologación indican que esta se concedió de acuerdo con los requisitos del Reglamento n.o 152 de las Naciones Unidas en su forma original.
1. Generalidades
En el presente anexo se definen los requisitos especiales de documentación, estrategia frente a fallos y verificación en relación con los aspectos relativos a la seguridad de los sistemas electrónicos de control del vehículo complejos (véase el punto 2.4) en lo que atañe al presente Reglamento.
El presente anexo será aplicable también a las funciones relacionadas con la seguridad señaladas en el presente Reglamento que se controlen mediante sistemas electrónicos (punto 2.3) en lo que atañe al presente Reglamento.
El presente anexo no especifica los criterios de rendimiento relativos al «sistema», sino que se ocupa de la metodología aplicada al proceso de diseño y de la información que debe revelarse al servicio técnico con fines de homologación de tipo.
Esta información deberá demostrar que el «sistema» respeta, en condiciones con y sin fallos, todos los requisitos de rendimiento pertinentes especificados en otras partes del presente Reglamento y que está diseñado para funcionar de forma que no genere riesgos de seguridad críticos.
2. Definiciones
A los efectos del presente anexo, se aplicarán las definiciones siguientes:
|
2.1. |
«Sistema»: sistema electrónico de control o sistema electrónico de control complejo que constituye la transmisión de control, o forma parte de ella, de una función a la que es aplicable el presente Reglamento. Se refiere también a cualquier otro sistema que entre dentro del ámbito de aplicación del presente Reglamento, así como a enlaces de transmisión hacia o desde otros sistemas que no entren dentro del ámbito de aplicación del presente Reglamento, pero que actúen sobre una función a la que sí le sea aplicable. |
|
2.2. |
«Concepto de seguridad»: descripción de las medidas que forman parte del sistema, por ejemplo dentro de las unidades electrónicas, para velar por la integridad del sistema, garantizando así su funcionamiento seguro en condiciones con y sin fallos, aun en caso de fallo eléctrico. La posibilidad de recurrir a un funcionamiento parcial o incluso a un sistema de reserva para mantener las funciones esenciales del vehículo puede formar parte del concepto de seguridad. |
|
2.3. |
«Sistema electrónico de control»: combinación de unidades diseñadas para producir conjuntamente la función de control del vehículo declarada, por medio del procesamiento electrónico de datos. Estos sistemas, controlados a menudo mediante software, se construyen a partir de componentes funcionales diferenciados, como sensores, unidades electrónicas de control y actuadores, y se conectan mediante enlaces de transmisión. Pueden incluir elementos mecánicos, electroneumáticos o electrohidráulicos. |
|
2.4. |
«Sistema electrónico de control del vehículo complejo»: sistema electrónico de control en el que una función controlada por un sistema electrónico o por el conductor puede ser anulada por un sistema electrónico de control o una función de un nivel superior. Una función anulada pasa a formar parte del sistema complejo, al igual que todo sistema/función prevaleciente que entre dentro del ámbito de aplicación del presente Reglamento. Se incluirán también los enlaces de transmisión hacia y desde sistemas/funciones prevalecientes que no entren dentro del ámbito de aplicación del presente Reglamento. |
|
2.5. |
Sistema/función «electrónico de control de un nivel superior»: aquel que emplea dispositivos adicionales de procesamiento y/o detección para modificar el comportamiento del vehículo ordenando variaciones de la función o las funciones del sistema de control del vehículo. Esto permite que los sistemas complejos cambien automáticamente sus objetivos en función de una escala de prioridades que depende de las circunstancias detectadas. |
|
2.6. |
«Unidad»: división más pequeña de los componentes del sistema que se considerará en el presente anexo, ya que estas combinaciones de componentes se tratarán como entidades únicas a efectos de identificación, análisis o sustitución. |
|
2.7. |
«Enlace de transmisión»: medio utilizado para interconectar las unidades distribuidas, con el fin de transmitir señales, datos relativos al funcionamiento o un suministro de energía. Este equipo es, por lo general, eléctrico, pero puede ser en parte mecánico, neumático o hidráulico. |
|
2.8. |
«Ámbito de control»: variable de salida que define el ámbito en el que el sistema puede ejercer su control. |
|
2.9. |
«Límite de funcionamiento efectivo»: límite físico externo dentro del cual el sistema puede mantener el control. |
|
2.10. |
«Función relacionada con la seguridad»: función del «sistema» que es capaz de cambiar el comportamiento dinámico del vehículo. «El sistema» puede ser capaz de desempeñar más de una función relacionada con la seguridad. |
3. Documentación
|
3.1. |
Requisitos
El fabricante deberá presentar una documentación que muestre el diseño básico del «sistema» y los medios por los que se conecta con otros sistemas del vehículo o mediante los cuales controla directamente las variables de salida. Deberán explicarse las funciones del «sistema» y el concepto de seguridad, según estén establecidos por el fabricante. La documentación deberá ser breve, pero deberá aportar pruebas de que en el diseño y el desarrollo se han aprovechado los conocimientos especializados de todos los ámbitos relacionados con el «sistema». De cara a las inspecciones técnicas periódicas, la documentación deberá describir el modo de comprobar el estado de funcionamiento del «sistema» en ese momento. El servicio técnico deberá determinar si la documentación demuestra que el «sistema»: a) está diseñado para funcionar, en condiciones con y sin fallos, de tal manera que no genere riesgos de seguridad críticos; b) cumple, en condiciones con y sin fallos, todos los requisitos de rendimiento pertinentes especificados en otras partes del presente Reglamento; y c) se desarrolló según el proceso/método de desarrollo declarado por el fabricante. |
|
3.1.1. |
La documentación deberá estar disponible en dos partes:
a) La documentación oficial para la homologación, que incluirá el material enumerado en el punto 3 (a excepción del mencionado en el punto 3.4.4) y se facilitará al servicio técnico cuando se presente la solicitud de homologación de tipo. El servicio técnico utilizará esta documentación como referencia de base para el proceso de verificación expuesto en el punto 4 del presente anexo. El servicio técnico se asegurará de que esta documentación esté disponible durante un período establecido de acuerdo con la autoridad de homologación. Dicho período durará, como mínimo, diez años a partir del cese definitivo de la producción del vehículo. b) El material adicional y los datos de análisis del punto 3.4.4, que conservará el fabricante, pero que se presentarán a inspección en el momento de la homologación de tipo. El fabricante se asegurará de que este material y los datos de análisis estén disponibles durante un período de diez años a partir del cese definitivo de la producción del vehículo. |
|
3.2. |
Descripción de las funciones del «sistema»
Deberá facilitarse una descripción que ofrezca una explicación simple de todas las funciones de control del «sistema» y de los métodos empleados para alcanzar los objetivos, indicando los mecanismos mediante los cuales se ejerce el control. Deberá señalarse toda función descrita que pueda ser anulada, y describirse con más detalle el cambio de criterio del funcionamiento de la función. |
|
3.2.1. |
Deberá proporcionarse una lista de todas las variables de entrada y detectadas, e indicarse su intervalo de funcionamiento. |
|
3.2.2. |
Deberá facilitarse una lista de todas las variables de salida que estén controladas por el «sistema» e indicarse, en cada caso, si dicho control es directo o se ejerce a través de otro sistema del vehículo. Deberá definirse el ámbito de control (punto 2.8) ejercido sobre cada una de estas variables. |
|
3.2.3. |
Cuando sea pertinente desde el punto de vista del rendimiento del sistema, deberán indicarse los límites de funcionamiento efectivo (punto 2.9). |
|
3.3. |
Configuración y esquema del sistema |
|
3.3.1. |
Inventario de componentes
Deberá facilitarse una lista en la que se enumeren todas las unidades del «sistema» y se indiquen los demás sistemas del vehículo que son necesarios para lograr la función de control de que se trate. Deberá proporcionarse un esquema que muestre la combinación de estas unidades e ilustre claramente la distribución de los equipos y las interconexiones. |
|
3.3.2. |
Funciones de las unidades
Deberá indicarse la función de cada unidad del «sistema» y deberán mostrarse las señales que las vinculen a otras unidades o a otros sistemas del vehículo. Esta información podrá suministrarse mediante un diagrama de bloques con etiquetas u otro tipo de esquema, o mediante una descripción acompañada de un diagrama de este tipo. |
|
3.3.3. |
Interconexiones
Las interconexiones presentes en el «sistema» deberán mostrarse mediante un diagrama de circuitos, en el caso de los enlaces de transmisión eléctricos, un diagrama de tuberías, en el caso del equipo de transmisión neumático o hidráulico, y un diagrama simplificado, en el caso de las conexiones mecánicas. Se mostrarán también los enlaces de transmisión hacia y desde otros sistemas. |
|
3.3.4. |
Flujo de señales, datos de funcionamiento y prioridades
Deberá haber una correspondencia clara entre estos enlaces de transmisión y las señales o los datos de funcionamiento transmitidos entre las unidades. Deberán declararse las prioridades de las señales o los datos de funcionamiento en los canales de datos multiplexados, siempre que la prioridad pueda afectar al rendimiento o la seguridad por lo que respecta al presente Reglamento. |
|
3.3.5. |
Identificación de las unidades
Cada unidad deberá estar identificada de manera clara e inequívoca (por ejemplo, mediante el marcado del hardware y el marcado, o una salida de software, del contenido lógico) para poder asociar el hardware a la documentación correspondiente. Cuando varias funciones se combinen en una única unidad o, de hecho, en un único ordenador, pero en el correspondiente diagrama se muestren en múltiples bloques para mayor claridad y para facilitar su explicación, deberá utilizarse un solo marcado de identificación del hardware. Al utilizar esta identificación, el fabricante estará afirmando que el equipo suministrado es conforme con el documento correspondiente. |
|
3.3.5.1. |
La identificación define la versión de hardware y de software y, en caso de que esta última cambie de tal modo que altere la función de la unidad por lo que respecta al presente Reglamento, deberá cambiarse también la identificación. |
|
3.4. |
Concepto de seguridad del fabricante |
|
3.4.1. |
El fabricante deberá presentar una declaración en la que afirme que la estrategia elegida para lograr los objetivos del «sistema» no perjudicará, en condiciones sin fallos, el funcionamiento seguro del vehículo. |
|
3.4.2. |
En cuanto al software empleado en el «sistema», deberá explicarse su arquitectura básica y deberán indicarse los métodos y las herramientas de diseño utilizados. El fabricante deberá presentar pruebas de los medios utilizados para determinar la realización de la lógica del sistema durante el proceso de diseño y de desarrollo. |
|
3.4.3. |
El fabricante deberá proporcionar al servicio técnico una explicación de las medidas de diseño integradas en el «sistema» para garantizar su funcionamiento seguro en condiciones de fallo. Tales medidas de diseño en caso de fallo del «sistema» pueden consistir, por ejemplo, en:
a) volver al funcionamiento con un sistema parcial; b) pasar a un sistema de reserva aparte; c) suprimir la función de nivel superior. En caso de fallo, deberá advertirse al conductor, por ejemplo mediante una señal de aviso o la aparición de un mensaje. Cuando el conductor no desactive el sistema, por ejemplo poniendo el interruptor de contacto (marcha) en la posición de off o desactivando esa función en particular, en caso de que exista un interruptor especial para ello, la señal de aviso deberá mantenerse mientras persista la condición de fallo. |
|
3.4.3.1. |
Si la medida elegida selecciona un modo de funcionamiento de rendimiento parcial en determinadas condiciones de fallo, deberán especificarse dichas condiciones y definirse los límites de eficacia resultantes. |
|
3.4.3.2. |
Si la medida elegida selecciona un medio secundario (de reserva) para lograr el objetivo del sistema de control del vehículo, deberán explicarse los principios del mecanismo que permite cambiar a dicho medio, la lógica y el nivel de redundancia, así como todas las características de comprobación de reserva incorporadas, y deberán definirse los límites de la eficacia de reserva resultantes. |
|
3.4.3.3. |
Si la medida elegida selecciona la supresión de la función de nivel superior, deberán inhibirse todas las señales de control de salida asociadas a dicha función, de tal manera que se limiten las perturbaciones de transición. |
|
3.4.4. |
La documentación deberá ir acompañada de un análisis que muestre, en términos generales, cómo se comportará el sistema en caso de que se produzca cualquier peligro o fallo que repercuta en el rendimiento del control del vehículo o en la seguridad de este.
El fabricante establecerá y mantendrá los enfoques analíticos elegidos y los pondrá a disposición del servicio técnico para su inspección en el momento de la homologación de tipo. El servicio técnico evaluará la aplicación de los enfoques analíticos. La evaluación incluirá: a) una inspección del enfoque de seguridad a nivel de concepto (vehículo) con la confirmación de que comprende un análisis de las interacciones con otros sistemas del vehículo; este enfoque se basará en un análisis de peligros/riesgos adecuado para la seguridad del sistema; b) una inspección del enfoque de seguridad a nivel de sistema; este enfoque se basará en un análisis modal de fallos y efectos (AMFE), un análisis por árbol de fallos o cualquier otro procedimiento similar que resulte adecuado para las consideraciones relativas a la seguridad del sistema; c) una inspección de los planes y los resultados de validación. En esta validación se utilizarán, por ejemplo, ensayos de tipo sistema físico en la realimentación (HIL, Hardware in the Loop), ensayos de funcionamiento del vehículo en carretera o cualquier otro medio apropiado de validación. La evaluación consistirá en controles de peligros y fallos elegidos por el servicio técnico para asegurarse de que la explicación del concepto de seguridad por parte del fabricante resulte comprensible y lógica y de que los planes de validación sean adecuados y se hayan completado. El servicio técnico podrá efectuar o pedir que se efectúen ensayos, según las especificaciones del punto 4, para verificar el concepto de seguridad. |
|
3.4.4.1. |
Esta documentación enumerará los parámetros objeto de seguimiento e indicará, para cada condición de fallo del tipo definido en el punto 3.4.4, la señal de aviso que deberá recibir el conductor o el personal encargado del mantenimiento o de la inspección técnica. |
|
3.4.4.2. |
En esta documentación se describirán las medidas adoptadas para garantizar que el «sistema» no perjudique el funcionamiento seguro del vehículo si el rendimiento de dicho «sistema» resulta afectado por las condiciones ambientales, tales como la meteorología, la temperatura, la entrada de polvo o de agua o la acumulación de hielo. |
4. Verificación y ensayo
|
4.1. |
El funcionamiento del «sistema», según se expone en los documentos exigidos en el punto 3, deberá someterse a ensayo como se indica a continuación. |
|
4.1.1. |
Verificación del funcionamiento del «sistema»
El servicio técnico verificará el «sistema» en condiciones sin fallos ensayando una serie de funciones seleccionadas entre las declaradas por el fabricante en el punto 3.2. En el caso de sistemas electrónicos complejos, los ensayos incluirán situaciones en las que se anule una función declarada. |
|
4.1.2. |
Verificación del concepto de seguridad del punto 3.4
Deberá comprobarse cómo reacciona el «sistema» ante la presencia de un fallo en cualquiera de las unidades, aplicando las señales de salida correspondientes a unidades eléctricas o elementos mecánicos con el fin de simular los efectos de fallos ocurridos dentro de la unidad. El servicio técnico llevará a cabo esta comprobación respecto a, como mínimo, una unidad, pero no comprobará la reacción del «sistema» ante múltiples fallos simultáneos de distintas unidades. El servicio técnico verificará que estos ensayos incluyan aspectos que puedan incidir en la controlabilidad del vehículo y la información al usuario (aspectos de la interfaz persona-máquina). |
|
4.1.2.1. |
Los resultados de la verificación deberán corresponderse con el resumen documentado del análisis de fallos, hasta un nivel de efecto global que confirme que el concepto de seguridad y la ejecución son adecuados. |
5. Notificación por parte del servicio técnico
La notificación de la evaluación por parte del servicio técnico se realizará de tal manera que permita su trazabilidad, por ejemplo codificando y enumerando en los registros del servicio técnico las versiones de los documentos inspeccionados.
El apéndice 1 del presente anexo recoge un ejemplo de modelo de formulario de evaluación remitido por el servicio técnico a la autoridad de homologación de tipo
Apéndice 1 del anexo 3
Modelo de formulario de evaluación de sistemas electrónicos
N.o de acta de ensayo: …
|
1. |
Identificación |
|
1.1. |
Marca del vehículo: … |
|
1.2. |
Tipo: … |
|
1.3. |
Medio de identificación del tipo, si está marcado en el vehículo: … |
|
1.4. |
Ubicación de ese marcado: … |
|
1.5. |
Nombre y dirección del fabricante: … |
|
1.6. |
En su caso, nombre y dirección del representante del fabricante: … |
|
1.7. |
Documentación oficial del fabricante:
N.o de referencia de la documentación: … Fecha de publicación original: … Fecha de la última actualización: … |
|
2. |
Descripción de los vehículos/sistemas de ensayo |
|
2.1. |
Descripción general: … |
|
2.2. |
Descripción de todas las funciones de control del «sistema» y los métodos de funcionamiento: … |
|
2.3. |
Descripción de los componentes y diagramas de las interconexiones dentro del «sistema»:… |
|
3. |
Concepto de seguridad del fabricante |
|
3.1. |
Descripción del flujo de señales y los datos relativos al funcionamiento y de sus prioridades: … |
|
3.2. |
Declaración del fabricante:
El fabricante…. afirma que la estrategia elegida para lograr los objetivos del «sistema» no perjudicará, en condiciones sin fallos, el funcionamiento seguro del vehículo. |
|
3.3. |
Arquitectura básica del software y métodos y herramientas de diseño utilizados: … |
|
3.4. |
Explicación de las disposiciones de diseño integradas en el «sistema» en condiciones de fallo: … |
|
3.5. |
Análisis documentado del comportamiento del «sistema» en las distintas condiciones de peligro o fallo: … |
|
3.6. |
Descripción de las medidas existentes respecto a las condiciones ambientales: … |
|
3.7. |
Disposiciones relativas a la inspección técnica periódica del «sistema»:… |
|
3.8. |
Resultados del ensayo de verificación del «sistema», de acuerdo con el punto 4.1.1 del anexo 3 del Reglamento n.o 152 de las Naciones Unidas: … |
|
3.9. |
Resultados del ensayo de verificación del concepto de seguridad, de acuerdo con el punto 4.1.2 del anexo 3 del Reglamento n.o 152 de las Naciones Unidas: … |
|
3.10. |
Fecha del ensayo: … |
|
3.11. |
Este ensayo se ha llevado a cabo y sus resultados se han consignado de conformidad con ... del Reglamento n.o 152 de las Naciones Unidas, modificado en último lugar por la serie ... de enmiendas.
Servicio técnico (1) que ha realizado el ensayo Firma: … Fecha: … |
|
3.12. |
Autoridad de homologación de tipo (1)
Firma: … Fecha: … |
|
3.13. |
Observaciones: … |
(1) Deben firmar personas diferentes, aun cuando el servicio técnico y la autoridad de homologación de tipo sean la misma entidad o, alternativamente, con el acta se expide una autorización aparte emitida por la autoridad de homologación de tipo.
Apéndice 2 del anexo 3
Situaciones de reacciones erróneas
1. Objetivo en forma de vehículo
|
1.1. |
Se colocarán dos vehículos estacionarios de la categoría M1 AA berlina, de la manera siguiente:
a) orientados en la misma dirección de desplazamiento que el vehículo objeto de ensayo; b) con una distancia de 4,5 m entre ellos; c) con sus partes traseras alineadas. |
|
1.2. |
El vehículo objeto de ensayo se desplazará a lo largo de una distancia mínima de 60 m, a una velocidad constante dentro del intervalo de velocidades indicadas en el cuadro del subapartado 5.2.1.4, hasta pasar centrado entre los dos vehículos estacionarios.
Durante el ensayo no se realizará ningún ajuste de los mandos del vehículo objeto de ensayo, salvo ligeros ajustes de la dirección para contrarrestar cualquier desvío. |
|
1.3. |
El AEBS no deberá dar el aviso de colisión ni iniciar el frenado de emergencia. |
2. Objetivo en forma de peatón
|
2.1. |
Se colocará un objetivo en forma de peatón conforme a lo prescrito en el subapartado 6.3.2, de la manera siguiente:
a) orientado en la misma dirección de desplazamiento que el vehículo objeto de ensayo; b) a una distancia de 1 m del lado del vehículo objeto de ensayo más próximo al objetivo por el lado más próximo al borde de la calzada. |
|
2.2. |
El vehículo objeto de ensayo se desplazará en línea recta a lo largo de una distancia mínima de 60 m, a una velocidad constante dentro del intervalo de velocidades indicadas en el cuadro del subapartado 5.2.2.4, hasta sobrepasar el objetivo en forma de peatón estacionario.
Durante el ensayo no se realizará ningún ajuste de los mandos del vehículo objeto de ensayo, salvo ligeros ajustes de la dirección para contrarrestar cualquier desvío. |
|
2.3. |
El AEBS no deberá dar el aviso de colisión ni iniciar el frenado de emergencia. |
Agencia Estatal Boletín Oficial del Estado
Avda. de Manoteras, 54 - 28050 Madrid





